🤖🪢
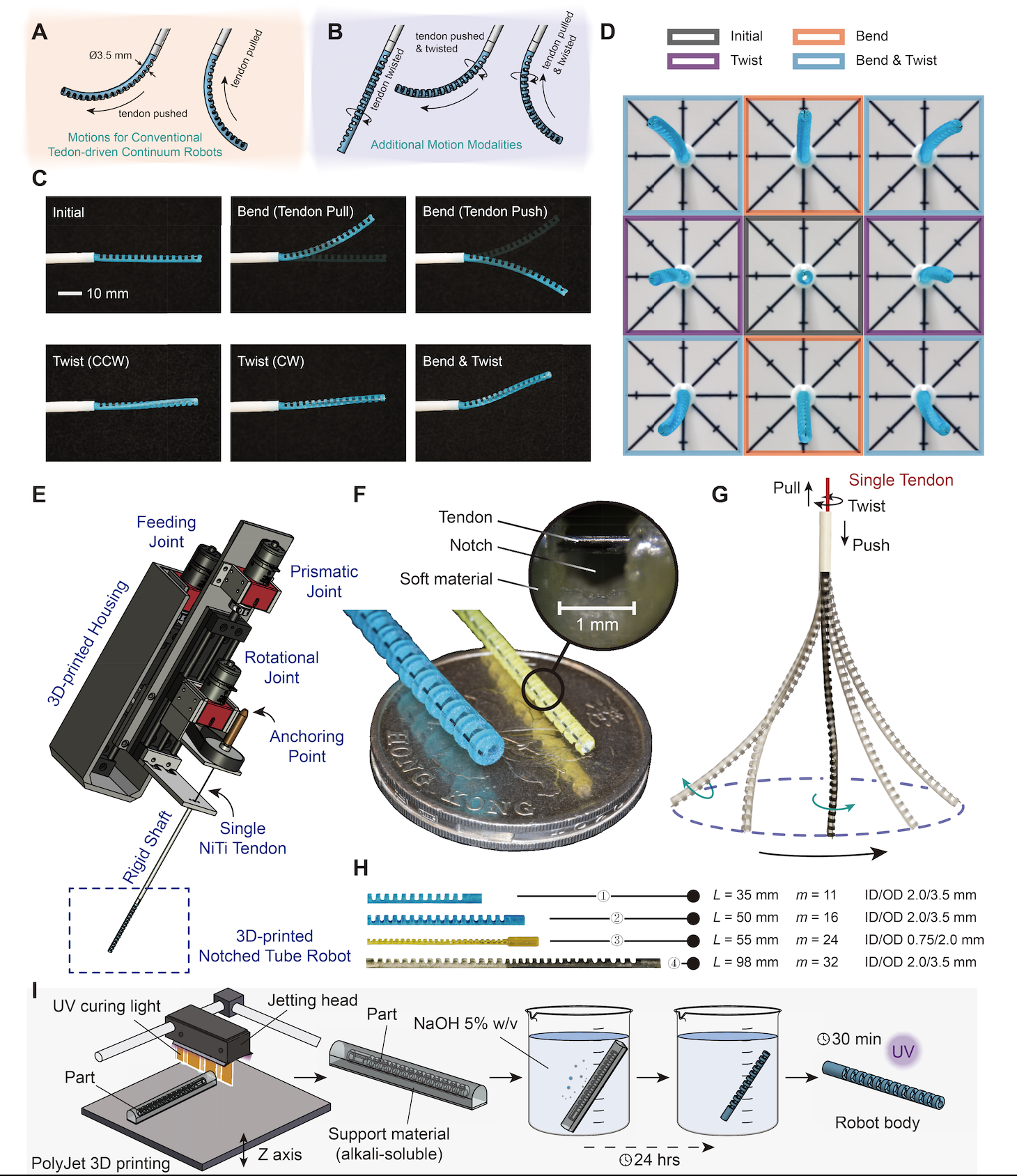
Thrilled to share our latest work published on Nature Communication, which redefines actuation for tendon-driven continuum robots — achieving full 3D omnidirectional motion and body twist using only a single tendon.
🧠✨ What we developed: A new class of continuum robots that:
🔹 Breaks Design Constraints: Eliminates the inherent trade-off between miniaturization and 3D manipulability by replacing multiple tendons with a single eccentric one.
🔹 Push-Pull-Twist Actuation: Achieves complex spatial movement through a unique driving mechanism.
🔹 High Efficiency: Features an outer diameter of 2.0–3.5 mm with a hollow ratio exceeding 57% — doubling the spatial utilization of traditional designs.
🔹 Open-Source Support: Includes a derived kinematics model and an open-source simulator for the robotics community.
🎯 Key Results:
- ✅ >1,000-fold Improvement: Massive increase in manipulability compared to conventional multi-tendon mechanisms.
- ✅ High Force Retention: Retains at least 70% of tip force across all directions.
- ✅ Versatile Demonstration: Proven success in teleoperation, navigation through tortuous environments, and “chopstick-like” continuum grippers.
💡 Why it matters: This work proves that miniature robots can maintain high dexterity and power without the bulk of traditional hardware, pointing toward the next generation of surgical actuators.
🌱 What’s next? We are exploring potential medical applications and the integration of these actuators into complex surgical procedures.