REN Lab is excited to join #ICRA2026 in Vienna! 🤖✨
This year, our team will present a range of recent work across medical robotics, embodied intelligence, bioinspired design, and robot-assisted surgery. We look forward to sharing our research progress, exchanging ideas with the international robotics community, and connecting with colleagues and collaborators throughout the conference.
Prof. Hongliang Ren’s talk:
WORKSHOP#1 – Medical Robot Workshop
(https://sites.google.com/view/icra26-workshop-medical-robot)
🗓 5 June, Friday, 9:20–9:50, Hall C
Talk: Endoluminal Robotics & Embodied AI in vivo
WROKSHOP#2 – Origami Robot Workshop
(https://sites.google.com/view/origamirob)
🗓 5 June, Friday, 10:10-10:30, Hall C
Talk: Origami and Kirigami Mechanisms in Medical Robotics
——————————————————————————————————————–
📌 Paper Presentation 1
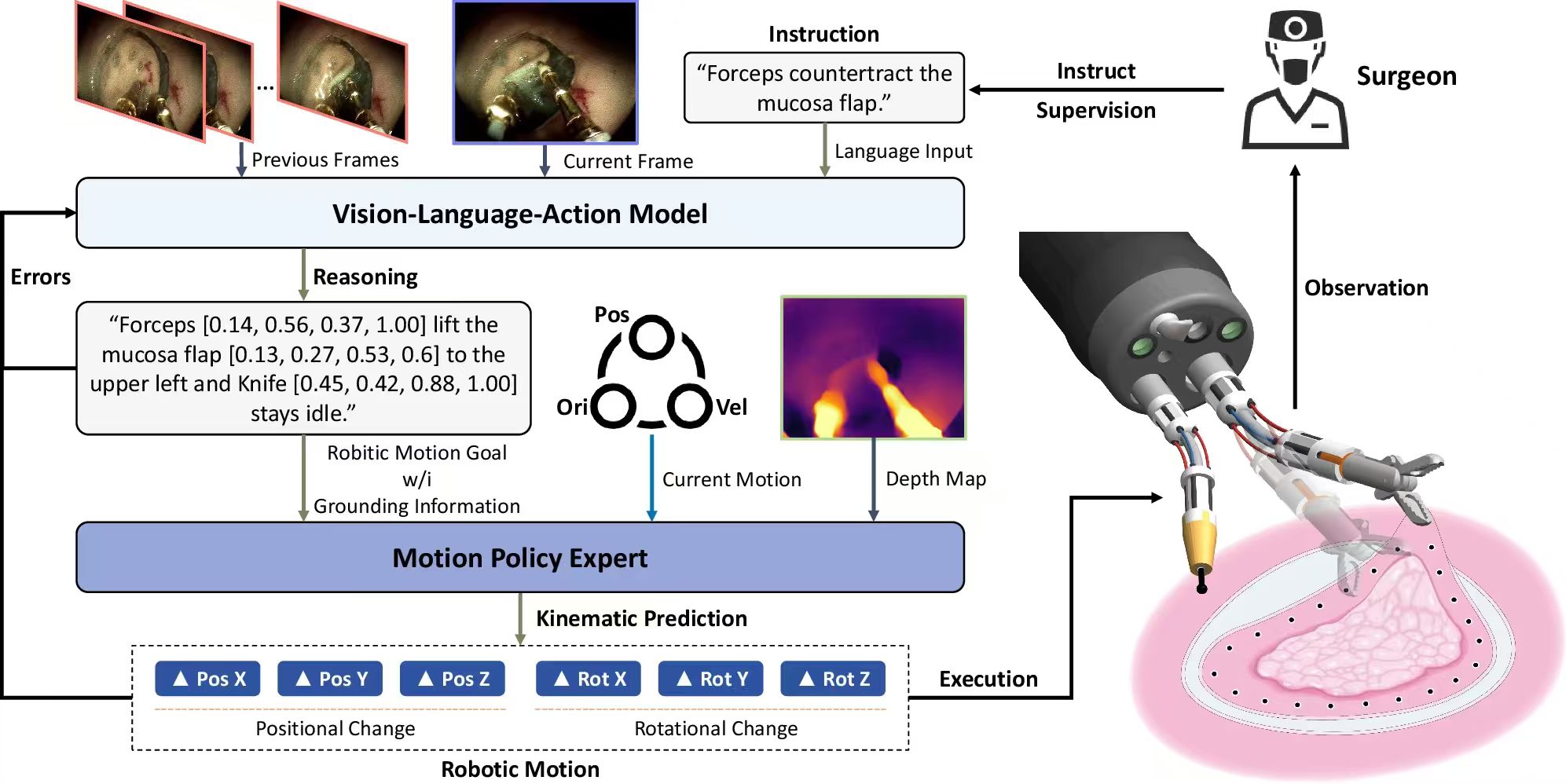
NeuroVLA: Surgical Scenario-Aware Learning of Debulking Skills in Endoscopic Robotic Neurosurgery Via Vision-Language-Action Model
Authors: Zhiwei Fang, Chi Kit Ng, Huxin Gao, Tao Zhang, Zhiqing Tang, Tat-Ming Chan, Hongbin Liu, Renzhi Wang, Hongliang Ren
🗓 2 June, Tuesday, 15:00–16:30
📍 Hall C, Interactive Session (Thl2l.287)
📌 Paper Presentation 2
GeoLanG: Geometry-Aware Language-Guided Grasping with Unified RGB-D Multimodal Learning
Authors: Rui Tang, Guankun Wang, Long Bai, Huxin Gao, Jiewen Lai, Chi Kit Ng, Jiazheng Wang, Fan Zhang, Hongliang Ren
🗓 3 June, Wednesday, 9:00–10:30
📍 Hall C, Interactive Session (Wel1l.271)
📄 Paper: https://arxiv.org/abs/2602.04231
🖥️ GitHub: https://github.com/Tomry1114/GeoLanG/tree/main
📌 Paper Presentation 3
TMR-VLA: Vision-Language-Action Model for Magnetic Motion Control of Tri-Leg Silicone-Based Soft Robot
Authors: Ruijie Tang, Chi Kit Ng, Kaixuan Wu, Long Bai, Guankun Wang, Yiming Huang, Yupeng Wang, Hongliang Ren
🗓 3 June, Wednesday, 9:00–10:30
📍 Hall C, Interactive Session (Wel1l.311)
📄 Paper: https://arxiv.org/html/2603.00420v1
📌 Paper Presentation 4
SurgVidLM: Towards Multi-Grained Video Understanding with Large Language Model in Robot-Assisted Surgery
Authors: Guankun Wang, Junyi Wang, Wenjin Mo, Long Bai, Kun Yuan, Ming Hu, Jinlin Wu, Junjun He, Yiming Huang, Nicolas Padoy, Zhen Lei, Hongbin Liu, Nassir Navab, Hongliang Ren
🗓 3 June, Wednesday, 15:00–16:30
📍 Hall C, Interactive Session (Wel12l.138)
📄 Paper: https://arxiv.org/abs/2506.17873
🖥️ GitHub: https://github.com/gkw0010/SurgVidLM
📌 Paper Presentation 5
IEEE Robotics & Automation Magazine: Transendoscopic Telerobotic System: Heterogeneous Flexible Manipulators for Bimanual Endoscopic Submucosal Dissection
Authors: Huxin Gao, Xiaoxiao Yang, Tao Zhang, Xiao Xiao, Changsheng Li, Max Q.-H. Meng, Xiuli Zuo, Yanqing Li, Hongliang Ren
🗓 3 June, Wednesday, 15:00–16:30
📍 Hall C, Interactive Session (Wel12l.332)
📄 Paper: https://ieeexplore.ieee.org/abstract/document/11304144/
📌 Paper Presentation 6
EndoDDC: Learning Sparse to Dense Reconstruction for Endoscopic Robotic Navigation Via Diffusion Depth Completion
Authors: Yinheng Lin, Yiming Huang, Beilei Cui, Long Bai, Huxin Gao, Hongliang Ren, Jiewen Lai
🗓 4 June, Thursday, 9:00–10:30 & 5 June Full day workshop @Embracing Intelligent Robotic Assistants for Robot-assisted Surgery in the Era of Embodied Intelligence: Trends, Opportunities, and Challenges
📍 Hall C, Interactive Session (Thl1l.111)
📄 Paper: https://arxiv.org/abs/2602.21893
🎥 Code: https://github.com/Yinheng-Lin/EndoDDC
📌 Paper Presentation 7
Bioinspired Kirigami Capsule Robot for Minimally Invasive Gastrointestinal Biopsy
Authors: Ruizhou Zhao, Yichen Chu, Shuwei Zhao, Wenchao Yue, Hongliang Ren, Raymond Shing-Yan Tang
🗓 4 June, Thursday, 9:00–10:30 & 5 June Full day workshop @Embracing Intelligent Robotic Assistants for Robot-assisted Surgery in the Era of Embodied Intelligence: Trends, Opportunities, and Challenges
📍 Hall C, Interactive Session (Thl1l.204)
📄 Paper: https://arxiv.org/abs/2602.06207