For more information, please visit the workshop homepage: https://sites.google.com/view/iros-2025-c4sr/




For more information, please visit the workshop homepage: https://sites.google.com/view/iros-2025-c4sr/
IEEE ACCESS. PREPRINT VERSION. ACCEPTED Dec, 2017
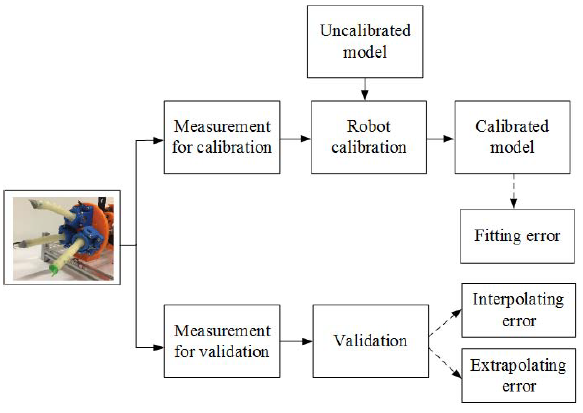
Abstract—Soft robotics is a research field growing rapidly with primary focuses on the prototype design, development of soft robots and their applications. Due to their highly deformable features, it is difficult to model and control such robots in a very precise compared with conventional rigid structured robots. Hence, the calibration and parameter identification problems of an underactuated robotic hand with soft fingers are important, but have not been investigated intensively. In this paper, we present a comparative study on the calibration of a soft robotic hand. The calibration problem is framed as an AX=YB problem with the partially known matrix A. The identifiability of the parameters is analyzed, and calibration methods based on nonlinear optimization (i.e., L-M method and interior-point method) and evolutionary computation (i.e., differential evolution) are presented. Extensive simulation tests are performed to examine the parameter identification using the three methods in a comparative way. The experiments are conducted on the real soft robotic-hand setup. The fitting, interpolating, and extrapolating errors are presented as well.

The micro actuator has been studied for its application in micro operations such as manipulating cellular aggregate, the tissues or drug delivery. The traditional actuation methods include thermo-mechanical actuation, electromagnetic actuation, electrostatic actuation and pneumatic actuation. Among these actuation methods, pneumatic actuation has the advantage of not generating heat and current during actuation.
We investigate
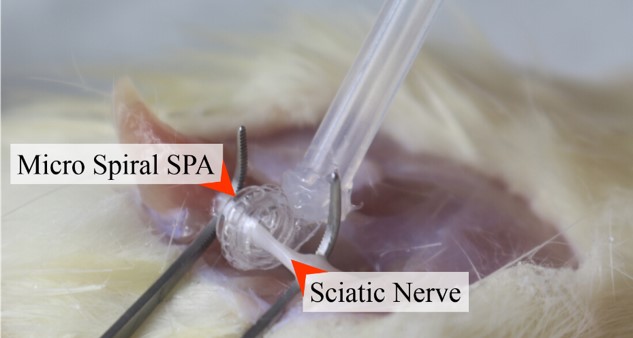
1) a streamlined and standardized fabrication procedure to make sub-millimeter scale soft pneumatic actuators (SPA) with customizable bending modalities achieved by shape engineering. Preliminary models are also given to interpret width-based shape engineering for customization and to compare the bending angle and radius of curvature measured from the characterization experiments.
2) a new micro pneumatic actuator consisting of two biocompatible materials is designed, fabricated and tested. The actuator has one bending degree of freedom and the largest bending deformation is about 115°.
Multiple-segment flexible and soft robotic actuators exhibit compliance but suffer from the difficulty of path planning due to their redundant degrees of freedom, although they are promising in complex tasks such as crossing body cavities to grasp objects. We propose a learning from demonstration method to plan the motion paths of flexible manipulators, by statistics machine-learning algorithms. To encode demonstrated trajectories and estimate suitable paths for the manipulators to reproduce the task, models are built based on Gaussian Mixture Model and Gaussian Mixture Regression respectively. The forward and inverse kinematic models of soft robotic arm are derived for the motion control. A flexible and soft robotic manipulator verifies the learned paths by successfully completing a representative task of navigating through a narrow keyhole.


Ultrasound imaging procedures are deemed as one of the most convenient and least invasive medical diagnostic imaging modalities and have been widely utilized in health care providers, which are expecting semiautomatic or fully-automatic imaging systems to reduce the current clinical workloads. This paper presents a portable and wearable soft robotic system which has been designed with the purpose of replacing the manual operation to cooperatively steer the ultrasound probe. This human-compliant soft robotic system, which is equipped with four separated parallel soft pneumatic actuators and is able to achieve movements in three directions. Vacuum suction force is introduced to attach the robot onto the intended body location. The design and fabrication of this soft robotic system are illustrated. To our knowledge, this is the first body-attached soft robot for compliant ultrasound imaging. The feasibility of the system is demonstrated through proof-of-concept experiments.

Developing a wearable soft robotic system (Figure 1), which is capable of mimicking the procedure of probe steering and optimizing the contact force and angle according to the specific conditions, has great significance of reducing the reliance of the ultrasound imaging on the experience of operators and obtaining images with high quality.
PhD Student: Xiaoyi Gu
FYP Student: Koon Lin Tan
Project Investigator: Hongliang Ren
Ren, H.; Gu, X. ; Tan, K. L. Human-Compliant Body-Attached Soft Robots Towards Automatic Cooperative Ultrasound Imaging 2016 20th IEEE International Conference on Computer Supported Cooperative Work in Design (CSCWD 2016), IEEE, 2016, –
Flexible robotic manipulators have been widely used in minimally invasive surgery (MIS) and many other applications requiring closer inspection and operation. Although a variety of manipulators enabled by different mechanism have been developed, few of them can preserve softness, thinness and decent bending capability simultaneously. We develop miniature soft robotic manipulators made of hyper-elastic silicone rubber. Along with the manipulator design, novel fabrication methods are proposed and elaborated. Detailed characterizations are specified to show the bending capability of the manipulator given different air pressure. Specifically, our manipulator, as thin as 6 mm, is able to achieve 360° directional bending, and, when given pressure over 70kPa, it can reach 180° bending angle and around 5mm bending radius easily. Due to its innate compliance and small dimension, this type of robotic manipulator can deliver safe and comfortable interactions with the subjects. More significantly, the novel fabrications in this paper diversify the fabrication methods for soft pneumatic robots and actuators (SPRA) and further scale down their sizes.
Continue reading