For more information, please visit the workshop homepage: https://sites.google.com/view/iros-2025-c4sr/




For more information, please visit the workshop homepage: https://sites.google.com/view/iros-2025-c4sr/
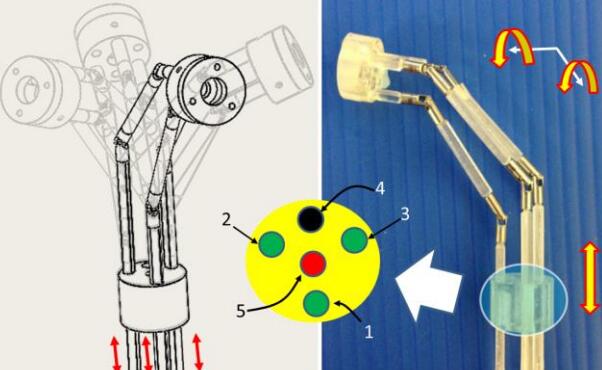
We presents a 5-DOF manipulator which consists of three parts, 1-DOF translational joint, a bendable skeleton (2-DOF for Omni-directional bending motion), and a rotatable forceps gripper (1-DOF for rotation, 1-DOF for opening/closing). The bendable segment in the manipulator achieves two orthogonal bending DOFs by pulling or pushing three parallel universal-joint-based shaft chains. Forward and inverse kinematics of the bendable skeleton is analyzed. The workspace calculation illustrates that the structure of the three parallel shaft chains can reach a bending angle of 90 degree in arbitrarily direction. The reachability of the manipulator is simulated in Adams. According to the surgical requirements, the manipulator is actuated to draw circle during the tests while the end effector is kept bending at 60 degree. The results show that the end effector can precisely track the planning trajectory (precision within 1 mm).
Q. Liu; J. CHEN; S. Shen; B. Zhang; M. G. Fujie; C. M. Lim & H. REN Design, Kinematics, Simulation of Omni-directional Bending Reachability for a Parallel Structure Forceps Manipulator BioRob2016, 6th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, June 26-29, 2016, Singapore, 201
Background: Accurate motion control of flexible surgical manipulators is crucial in tissue manipulation tasks. Tendon-driven serpentine manipulator (TSM) is one of the most widely adopted flexible mechanisms in MIS for its enhanced maneuverability in torturous environment. TSM, however, exhibits high nonlinearities and conventional analytical kinematics model is insufficient to achieve high accuracy.
Methods: To account for the system nonlinearities, we applied data driven approach to encode the system inverse kinematics. Three regression methods: Extreme Learning Machine (ELM), Gaussian Mixture Regression (GMR) and K-Nearest Neighbors Regression (KNNR) were implemented to learn a nonlinear mapping from the robot 3D position state to the control inputs.
Results: The performance of the three algorithms were evaluated both in simulation and physical trajectory tracking experiments. KNNR performs the best in the tracking experiments with the lowest RMSE of 2.1275mm.
Conclusions: The proposed inverse kinematics learning methods provide an alternative and efficient way to accurately model the challenging tendon driven flexible manipulator.
Keywords: Tendon-driven serpentine manipulator; surgical robotics; Inverse kinematics; Heuristic Methods

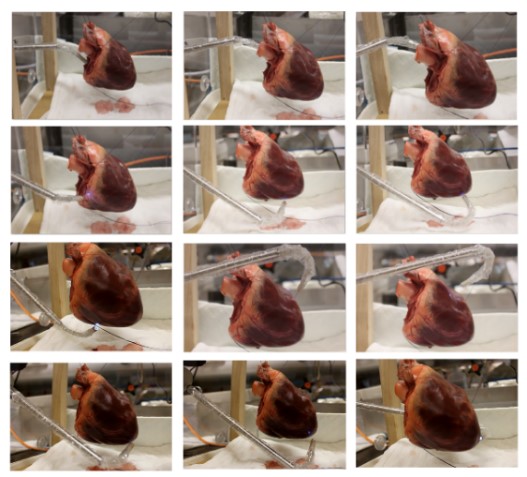
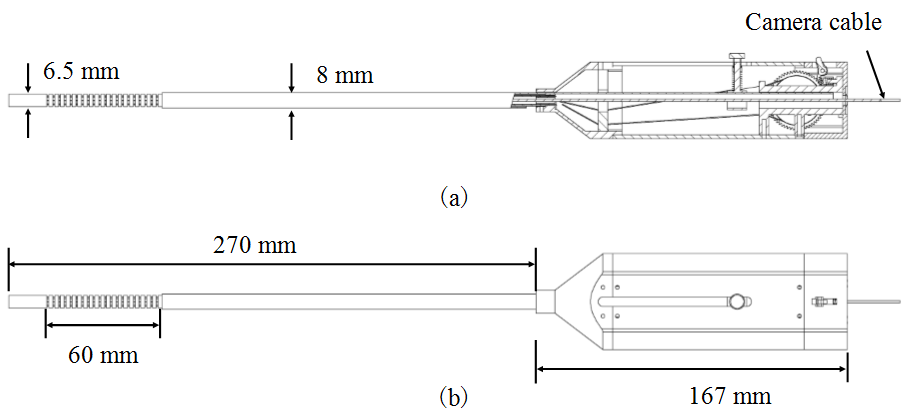
We present a novel flexible endoscope (FE) which is well suited to minimally invasive cardiac surgery (MICS). It is named the cardioscope. The cardioscope is composed of a handle, a rigid shaft, a steerable flexible section, and the imaging system. The flexible section is composed of an elastic tube, a number of spacing disks, a constraint tube, and four wires. It employs the constrained wire-driven flexible mechanism (CWFM) with a continuum backbone, which enables the control of both the angulation and the length of the flexible section. Compared to other endoscopes, e.g., rigid endoscope (RE) and fixed-length FE, the cardioscope is much more dexterous. The cardioscope can bend over 180 deg in all directions, and the bending is decoupled from the distal tip position. Ex vivo tests show that the cardioscope is well suited to MICS. It provides much wider scope of vision than REs and provides good manipulation inside confined environments. In our tests, the cardioscope successfully explored the full heart through a single hole, which shows that the design is promising. Despite being designed for MICS, the cardioscope can also be applied to other minimally invasive surgeries (MISs), such as laparoscopy, neurosurgery, transnasal surgery, and transoral surgery.
The micro actuator has been studied for its application in micro operations such as manipulating cellular aggregate, the tissues or drug delivery. The traditional actuation methods include thermo-mechanical actuation, electromagnetic actuation, electrostatic actuation and pneumatic actuation. Among these actuation methods, pneumatic actuation has the advantage of not generating heat and current during actuation.
We investigate
1) a streamlined and standardized fabrication procedure to make sub-millimeter scale soft pneumatic actuators (SPA) with customizable bending modalities achieved by shape engineering. Preliminary models are also given to interpret width-based shape engineering for customization and to compare the bending angle and radius of curvature measured from the characterization experiments.
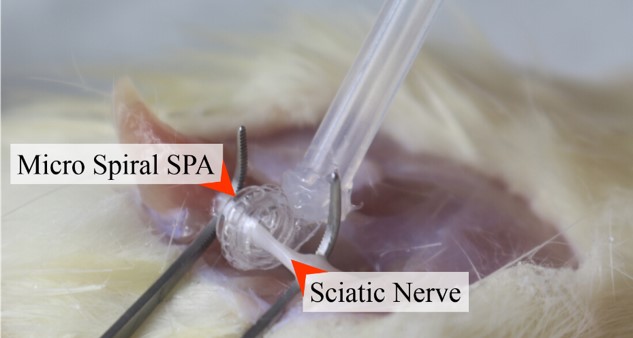
2) a new micro pneumatic actuator consisting of two biocompatible materials is designed, fabricated and tested. The actuator has one bending degree of freedom and the largest bending deformation is about 115°.
Multiple-segment flexible and soft robotic actuators exhibit compliance but suffer from the difficulty of path planning due to their redundant degrees of freedom, although they are promising in complex tasks such as crossing body cavities to grasp objects. We propose a learning from demonstration method to plan the motion paths of flexible manipulators, by statistics machine-learning algorithms. To encode demonstrated trajectories and estimate suitable paths for the manipulators to reproduce the task, models are built based on Gaussian Mixture Model and Gaussian Mixture Regression respectively. The forward and inverse kinematic models of soft robotic arm are derived for the motion control. A flexible and soft robotic manipulator verifies the learned paths by successfully completing a representative task of navigating through a narrow keyhole.


Nasopharynx cancer, or nasopharyngeal carcinoma (NPC), is a tumor that originates in the nasopharynx, the uppermost region of the pharynx where the nasal passage and the throat join. It is a common disease occurring to ethnic Chinese people living in or emigrating from southern China; it is also the eighth most frequently occurred cancer among Singaporean men. Traditional posterior nasopharyngeal biopsy using a flexible nasal endoscope has the risks of abrasion and injury to the nasal mucosa and thus causing trauma to the patient. Therefore, the goal of this project is to develop a compact continuum tubular robotic system to achieve collision free nasopharyngeal biopsy.

Fig.1 Illustration of the proposed CTR for nasopharyngeal biopsy.
We developed a compact CTR which is 35 cm in total length, 10 cm in diameter, 2.15 kg in weight, and easy to be integrated with a robotic arm to perform more complicated operations.

Fig.2 The proposed continuum tubular robot

Fig.3 Compact and light weight CTR integrated with a positioning arm for
better conducting surgery
We also developed a 3D printed biopsy needle to equip our robot for transnasal biopsy procedure.

Fig.4 3D printed biopsy needle for transnasal biopsy
The workspace of the robot was analyzed to determine optimized tube parameters.

Fig.5 Workspace comparison for 3-DOF CTR with three initial configurations.
Top: all the outstretched part of the inner tube exposes; Middle: the outstretched part of the inner tube is partially covered by the outer tube; Bottom: the outstretched part of the inner tube is totally covered by the outer tube.
Further more, by using an electromagnetic tracking system, we are able to build a navigation system with shape reconstruction for the tubes.

Fig.6 Shape reconstruction using 3-order Bézier curve fitting

Fig.7 Sensing by EM tracker

Fig.8 Navigation interface
Three groups of experiments were carried out. The first group is to tele-operate the robot to follow a linear path and a circular path. We found that the path following accuracy was about 2 mm.

Fig.9 Tele-operating the robot to follow a linear path and a circular path

Fig.10 Accuracy of the robot following the predefined paths
The second group is to validate the shape reconstruction algorithm. The accuracy of the results is about 1 mm.

Fig.11 Reconstruction setup

Fig.12 Reconstruction error
In the last group of experiments, the robot was tested in a biopsy procedure on a cadaver. The feasibility of the proposed robotic system was validated.

Fig.13 Cadaver experiment setup

Fig.14 Cadaver experiment process
Research Fellow: Liao Wu
PhD Student: Keyu Wu
FYP Student: Li Ting Lynette Teo
Intern Student: Jan Feiling and Xin Liu
Project Investigator: Hongliang Ren
[1] Liao Wu, Shuang Song, Keyu Wu, Chwee Ming Lim, Hongliang Ren. Development of a compact continuum tubular robotic system for nasopharyngeal biopsy. Medical & Biological Engineering & Computing. 2016.
[2] Keyu Wu, Liao Wu, Hongliang Ren. Motion planning of continuum tubular robots based on features extracted from statistical atlas. In: Proceedings of 2015 IEEE International Conference on Intelligent Robots and Systems (IROS 2015).
[3] Keyu Wu, Liao Wu, Chwee Ming Lim, Hongliang Ren. Model-free image guidance for intelligent tubular robots with pre-clinical feasibility study: towards minimally invasive trans-orifice surgery. In: Proceedings of 2015 IEEE International Conference on Information and Automation (ICIA 2015). ( best paper finalist)
[4] Benedict Tan, Liao Wu, Hongliang Ren. Prototype development of a handheld tubular curvilinear robot for minimally invasive surgery. In: The 11th Asian Conference on Computer Aided Surgery (ACCAS 2015).
[5] Keyu Wu†, Liao Wu†, Hongliang Ren. An image based targeting method to guide a curvilinear concentric tube robot. In: Proceedings of 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014). Bali, Indonesia, 2014: 386-391 († equally contributed author).
This project aims to develop a flexible manipulator for transnasal/transoral surgery. Compared with existing surgical manipulators, the developed one should have better performance in workspace and dexterity, thus better facilitate the surgical operation.
A constrained tendon-driven serpentine manipulator (CTSM) is designed as shown in Figure 1. It includes an underactuated tendon-driven flexible section, a constraint and a set of tendons. The tendon-driven flexible section is similar to our previous wire-driven robot arm design. It comprises of several identical vertebras, and an elastic tube. Two successive vertebras form a joint and the joint rotation follows the elastic tube bending. Four tendons pass through all the vertebras. For each tendon, the two ends are attached to the distal vertebra and the motor respectively. These tendons are grouped to two pairs and are orthogonally arranged as shown in Figure. 1 (b). One tendon pair controls the bending about X axis and the other tendon pair controls the bending about Y axis. The manipulator bending is planar. The bending angle and bending direction are controlled by the motion of the four tendons. The constraint can be an elastic tube or rigid tube. The constraint translates along the tendon-driven flexible section. Vertebras in the range of the constraint are confined and vertebras out of the range of the constraint are free of rotation. Thus, the last constrained vertebra serves the base of the bending section.

Figure 1 3D design of the CTSM: (a) the assembled and explosion view of the CTSM; (b) the tendon configuration; (c) the cross section view of the joint.
The bending motion of the manipulator is shown in Figure 2: when the insertion of the constraint is 0, the CTSM bends by the tendons as a traditional TSM. By pushing the constraint forward the backbone is segmented to two parts: the proximal constrained section and the distal free bending section. Compared to the distal free bending section, the proximal constrained section is stiffer and the joints’ rotations are smaller. By pushing and pulling the constraint, the lengths of the two sections are controlled.

Fig. 2 Bending motion illustration: (a) the bending section is not constrained; (b) part of the bending section is constrained; (c) the whole bending section is constrained.
A prototype is built as shown in Figure 3. In the prototype, the flexible backbone has 27 vertebras. The vertebras are fabricated by 3D printing, and the material used is plastic. Each joint can rotate up to 7.25°.The total length of the flexible backbone is 104mm, and the diameter is 7.5mm. A silicon rubber tube serves the elastic tube. The outer diameter is 3 mm and inner diameter is 2 mm. Four steel wires with nylon coating are used to control the backbone bending. The diameter of the steel is 0.3 mm. The wires are arranged orthogonally, with opponent wires make a pair. Each wire pair is connected to a drum wheel. The rotation of the drum wheel is controlled by a servo motor. The diameter of the drum wheel is 50 mm. The wires are guided by a Teflon tube, whose outer diameter is 0.9 mm and inner diameter is 0.5 mm. The replaceable constraint is hold by a chuck, which is mounted on the linear actuator. The range of the linear actuator is 100 mm.
By changing the stiffness ratio between the flexible bending section and the overall stiffness λ, the workspace of the CTSM is as shown in Figure 4. In the simulation the length of the CTSM is 100 mm, and the number of vertebrae is 25.

Fig. 4 workspace comparison: (a) traditional TSM; (b) CTSM with elastic constraint; (c) CTSM with elastic constraint; (d) CTSM with rigid constraint.
When the CTSM with a rigid constraint is attached to a mobile base, the workspace and dexterity distribution are shown in Figure 5. For the tendon-driven serpentine manipulator (TSM), the dexterity is indexed as the kinematic flexibility. For a traditional TSM, the kinematic flexibility is 1 in most places; the maximum is 2. For the designed CTSM, the kinematic flexibility is enhances all over the workspace and the maximum is 15.

Figure 5 Comparison of the dexterity distribution over the workspace: (a) traditional TSM; (b) CTSM with λ=0.
Staff: Zheng Li
Visiting Students: Gui Fu, Zhengchu Tan, Jan Feiling
PIs: Hongliang Ren and Haoyong Yu
– Phantom tests
– CTSM Experiments in ex-vivo hearts and phantoms (2014/11/22)
1. Zheng Li, Haoyong Yu and Hongliang Ren, “A Novel Constrained Tendon-driven Serpentine Manipulator (CTSM)”, ICRA 2015 (under review)
2. Zheng Li, Haoyong Yu and Hongliang Ren, “A Novel Underactuated Wire-driven Flexible Robotic Arm with Controllable Bending Section Length”, ICRA 2014 Workshop on Advances in Flexible Robots for Surgical Interventions, Hong Kong, May 31-June 7, 2014
3. Zheng Li, Ruxu Du, Haoyong Yu and Hongliang Ren, “Statics Modeling of an Underactuated Wire-driven Flexible Robotic Arm”,IEEE BioRob 2014, Sao Pauo, Brazil, Aug12-15, 2014
<!–

Fig. 3 CTSM prototype.
.–>