


Abstract
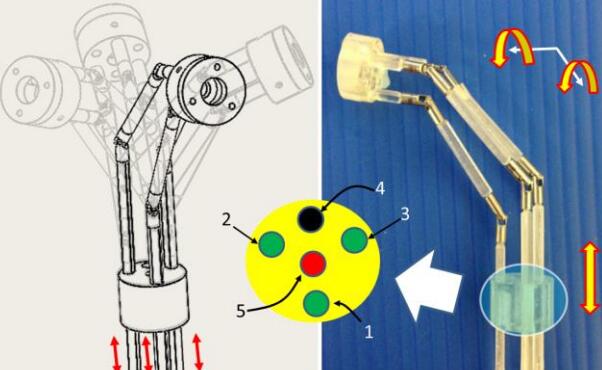
We presents a 5-DOF manipulator which consists of three parts, 1-DOF translational joint, a bendable skeleton (2-DOF for Omni-directional bending motion), and a rotatable forceps gripper (1-DOF for rotation, 1-DOF for opening/closing). The bendable segment in the manipulator achieves two orthogonal bending DOFs by pulling or pushing three parallel universal-joint-based shaft chains. Forward and inverse kinematics of the bendable skeleton is analyzed. The workspace calculation illustrates that the structure of the three parallel shaft chains can reach a bending angle of 90 degree in arbitrarily direction. The reachability of the manipulator is simulated in Adams. According to the surgical requirements, the manipulator is actuated to draw circle during the tests while the end effector is kept bending at 60 degree. The results show that the end effector can precisely track the planning trajectory (precision within 1 mm).
Video demo
Publications
Q. Liu; J. CHEN; S. Shen; B. Zhang; M. G. Fujie; C. M. Lim & H. REN Design, Kinematics, Simulation of Omni-directional Bending Reachability for a Parallel Structure Forceps Manipulator BioRob2016, 6th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, June 26-29, 2016, Singapore, 201