Thrilled to share our newly accepted paper in IEEE Transactions on Medical Robotics and Bionics, where we introduce a soft, endoscope-deployable microfluidic suction robot that combines multimodal intraluminal locomotion with localized aspiration and sampling for targeted mucus clearance and liquid biopsy.
🧠✨ What we developed:
A soft intraluminal robotic platform that:
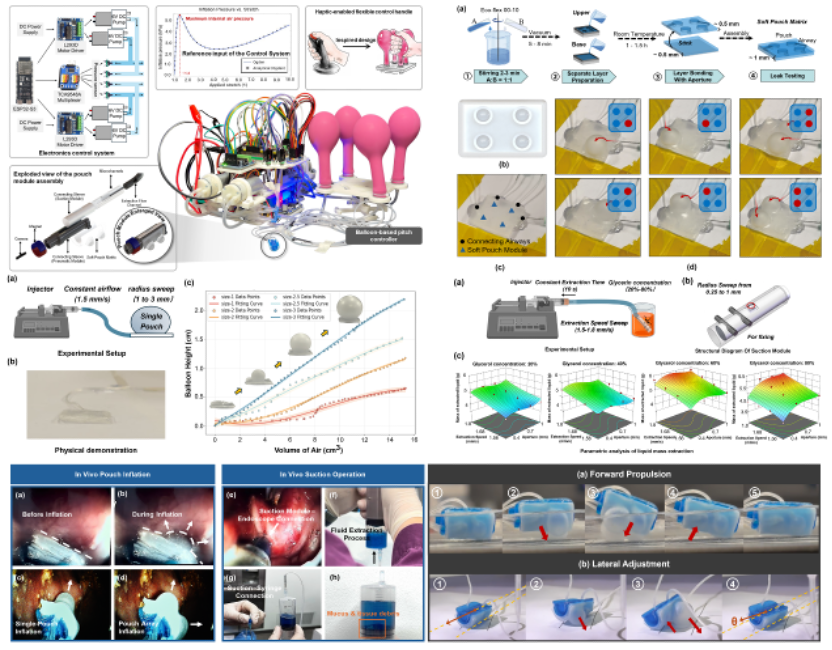
🔹 Integrates Locomotion + Sampling: A pneumatically controlled 2×2 pouch matrix for multimodal actuation, paired with an independent microfluidic suction module for active liquid extraction and sample recovery.
🔹 Enables Stable Pitch Control: A balloon-based pitch control mechanism improves controllability for intraluminal operation, with the best overall performance observed at an initial pressure range of 2–3 kPa.
🔹 Balances Compliance and Safety: Single-pouch characterization guided the selection of a 2 mm pouch radius, achieving up to 246.91% maximum deformation; burst tests show a system safety factor ≈ 5.27 under the reported operating conditions.
🔹 Targets Real Clinical Pain Points: Designed for constrained lumens (e.g., distal airway) where conventional airway clearance approaches struggle with reach and effectiveness.
🎯 Key Results:
✅ Multimodal mobility: Differential actuation achieves 26.9 mm/min forward speed and 4.86° yaw per drive cycle.
✅ Robust suction across viscosities: Efficiently extracts 20–80% glycerol solutions within 10 s (via parameter tuning).
✅ In vivo feasibility: Endoscope-assisted porcine validation confirmed sequential pouch-driven motion and successful recovery of biological samples containing mucus and tissue fragments after saline irrigation.
💡 Why it matters:
This work demonstrates a compliant, integrated “move + anchor + suction” approach for narrow lumens—supporting safer localized intervention and sampling, with a path toward distal airway translation.
🌱 What’s next?
We’re moving toward more automated closed-loop pneumatic control, improved steerability/navigation, and miniaturization for deeper airway access—while expanding validation in airway-specific models.
](https://postimg.cc/ppBCjWfN)