


Team visit to FANUC Singapore PTE LTD, observing intelligent and collaborative robotic systems

Author: admin
Dr Ren Invited to Talk at NEU
Dr Ren was Invited to Talk at NEU (Northeastern University of China)

Dr Ren Invited to Talk at SUSTC
Dr Ren Invited to Talk at SUSTC (South University of Science and Technology of China) about recent developments in flexible surgical robotics.

Towards hybrid control of a flexible curvilinear surgical robot with visual/haptic guidance
Abstract
Comprised of multiple telescoptic precurved tubesthat can independently rotate and translate, concentric tuberobots (CTRs) are favorable in minimally invasive surgeriesthanks to their small size and considerable dexterity along withcurvilinear accessibility. However, there is a lack of investigationon improvement of the surgeons’ perception which in turn canbe used to guide the telemanipulation. In this work, we proposedan eye-in-hand configuration for the concentric tube robot byadding an endoscope to the tip of the inner tube, which providesdirect and intuitive visual sensing ability for the operator. Basedon this visual feedback, we further developed two frameworksfor the hybrid control of CTR, namely Teleoperation BeforeVisual Servoing (TBVS) and Teleoperation During Visual Ser-voing (TDVS). The structures of these two frameworks wereelaborated with key algorithms derived. The effectiveness ofthe proposed methods were demonstrated through a series ofexperiments both in free space and in a confined environment(inside a skull model). The results manifested that the visualguidance had the potential of assisting the operator to controlthe CTR more efficiently.
More information
Data-driven Learning Intelligent Control for Flexible Surgical Manipulators
Abstract
Automate Surgical Tasks for A Flexible Serpentine Manipulator via Learning Actuation Space Trajectory from Demonstration
Background: Accurate motion control of flexible surgical manipulators is crucial in tissue manipulation tasks. Tendon-driven serpentine manipulator (TSM) is one of the most widely adopted flexible mechanisms in MIS for its enhanced maneuverability in torturous environment. TSM, however, exhibits high nonlinearities and conventional analytical kinematics model is insufficient to achieve high accuracy.
Methods: To account for the system nonlinearities, we applied data driven approach to encode the system inverse kinematics. Three regression methods: Extreme Learning Machine (ELM), Gaussian Mixture Regression (GMR) and K-Nearest Neighbors Regression (KNNR) were implemented to learn a nonlinear mapping from the robot 3D position state to the control inputs.
Results: The performance of the three algorithms were evaluated both in simulation and physical trajectory tracking experiments. KNNR performs the best in the tracking experiments with the lowest RMSE of 2.1275mm.
Conclusions: The proposed inverse kinematics learning methods provide an alternative and efficient way to accurately model the challenging tendon driven flexible manipulator.
Keywords: Tendon-driven serpentine manipulator; surgical robotics; Inverse kinematics; Heuristic Methods

Demo video at:
Publications
- W. Xu; J. Chen; H. Y. Lau & H. Ren Data-driven Methods towards Learning the Highly Nonlinear Inverse Kinematics of Tendon-driven Surgical Manipulators International Journal of Medical Robotics and Computer Assisted Surgery , 2016, 1-13
- W. Xu; J. Chen; H. Y. Lau & H. Ren Automate Surgical Tasks for A Flexible Serpentine Manipulator via Learning Actuation Space Trajectory from Demonstration ICRA2016, IEEE International Conference on Robotics and Automation, 2016, –
Cardioscope
Abstract:
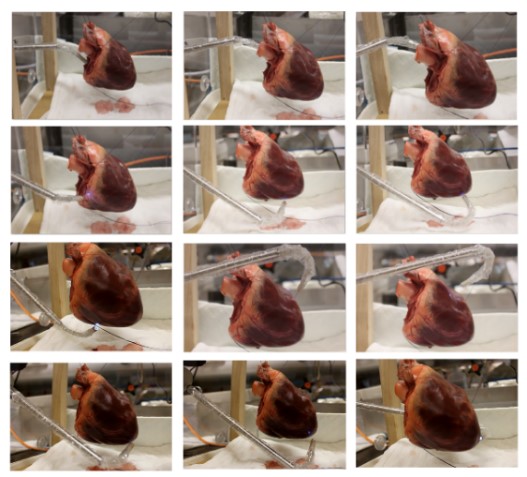
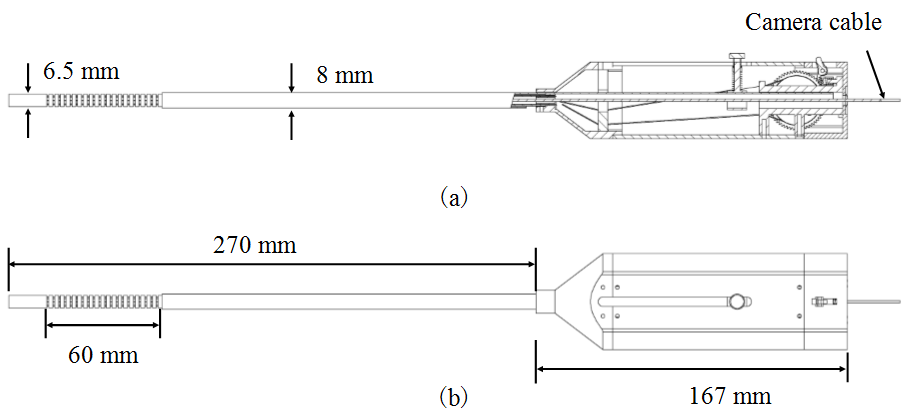
We present a novel flexible endoscope (FE) which is well suited to minimally invasive cardiac surgery (MICS). It is named the cardioscope. The cardioscope is composed of a handle, a rigid shaft, a steerable flexible section, and the imaging system. The flexible section is composed of an elastic tube, a number of spacing disks, a constraint tube, and four wires. It employs the constrained wire-driven flexible mechanism (CWFM) with a continuum backbone, which enables the control of both the angulation and the length of the flexible section. Compared to other endoscopes, e.g., rigid endoscope (RE) and fixed-length FE, the cardioscope is much more dexterous. The cardioscope can bend over 180 deg in all directions, and the bending is decoupled from the distal tip position. Ex vivo tests show that the cardioscope is well suited to MICS. It provides much wider scope of vision than REs and provides good manipulation inside confined environments. In our tests, the cardioscope successfully explored the full heart through a single hole, which shows that the design is promising. Despite being designed for MICS, the cardioscope can also be applied to other minimally invasive surgeries (MISs), such as laparoscopy, neurosurgery, transnasal surgery, and transoral surgery.
Demo video
Publications
- Z. Li; M. Zin Oo; V. Nalam; V. Duc Thang; H. Ren; T. Kofidis & H. Yu Design of a Novel Flexible Endoscope- Cardioscope Journal of Mechanisms and Robotics, ASME, 2016, 8, 051014-051014
- Z. Li; M. Z. Oo; V. D. Thang; V. Nalam; T. Kofidis; H. Yu & H. Ren Design of a Novel Flexible Endoscope – Cardioscope 2015 IDETC: ASME 2015 International Design Engineering Technical Conferences , 2015
Shape Morphing Microscale Soft Robotic Actuators
Abstract
The micro actuator has been studied for its application in micro operations such as manipulating cellular aggregate, the tissues or drug delivery. The traditional actuation methods include thermo-mechanical actuation, electromagnetic actuation, electrostatic actuation and pneumatic actuation. Among these actuation methods, pneumatic actuation has the advantage of not generating heat and current during actuation.
We investigate
1) a streamlined and standardized fabrication procedure to make sub-millimeter scale soft pneumatic actuators (SPA) with customizable bending modalities achieved by shape engineering. Preliminary models are also given to interpret width-based shape engineering for customization and to compare the bending angle and radius of curvature measured from the characterization experiments.
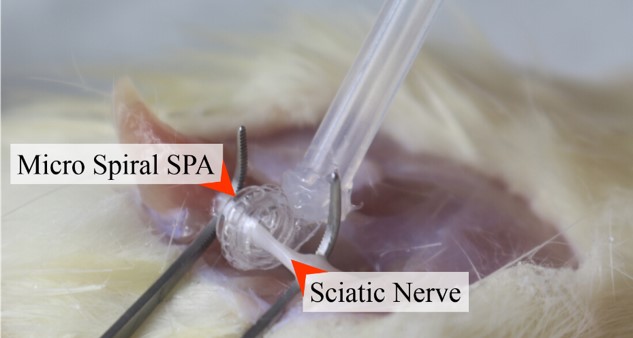
2) a new micro pneumatic actuator consisting of two biocompatible materials is designed, fabricated and tested. The actuator has one bending degree of freedom and the largest bending deformation is about 115°.
Publications
- X. Liang; Y. Sun & H. Ren A Flexible Fabrication Approach towards the Shape Engineering of Microscale Soft Pneumatic Actuators IEEE Robotics and Automation Letters, 2016, 1-6
- X. Liang; C. Lee & H. Ren Towards a Micro Pneumatic Actuator with Large Bending Deformation for Medical Interventions 7th WACBE World Congress on Bioengineering, 6th to 8th July, 2015, Singapore, Springer International Publishing, 2015, 52, 76-79
- P. M. Khin; J. H. Low; S. Kukreja; H. Ren & R. Yeow Soft Haptics Using Soft Actuator and Soft Sensor BioRob2016, 6th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, June 26-29, 2016, Singapore, 2016
ICBME 2016 Special Symposium in surgical navigation and robotics
ICBME 2016 Special Symposium on Surgical Robotics and Navigation Symposium
Organizing Chairs: Hongliang Ren (Singapore), Etsuko Kobayashi (Japan)


Themes
- Computer-Assisted Surgery
- Flexible Robotics and navigation in Surgery
- Artificial Intelligence in Robotic Surgery
Date: Dec 7, 2016 U-Town
Gallery
https://goo.gl/photos/vCNqYfWmD26UF41j7
Speakers and Topics

Keynote speaker: SAKUMA, Ichiro, University of Tokyo
- COMPUTER AIDED SURGERY FOR ASSISTING MINIMALLY INVASIVE THERAPIES
- Abstract
Minimally invasive therapy such as endoscopic surgery and catheter based intervention are being spread in many surgical intervention fields. Thus engineering assistance is important to realize safe and effective minimally invasive therapy. Computer Assisted Surgical guidance such as surgical navigation is one of key technologies. It is expected that application of robotic technology to minimally invasive surgery will provide the following functions:
(1) Precise manipulation of biological tissues and surgical instruments in narrow and confined surgical field.
(2) Precise and accurate localization of therapeutic devices using various pre and intra-operative medical information.In the first mode of application, more compact system is required. It can be realized by introduction of novel mechanical design and application off a new mechanism as well as new materials. At the same time integration with various energy devices are also required. Intra-operative guidance utilizing various pre and intra operative information is necessary in the second mode of application. Image guided robotic system for RF ablation, laser ablation, intensity modified radiation therapy, and high intensity focused ultrasound. In this type of robot, various preand intraoperative information including functional information is used to navigate the therapeutic devices to the target lesion. Intra-operative identification of pathological state of the target tissue and evaluation of outcome after therapeutic intervention are also important.Factors limiting the application of surgical navigation systems and medical robotics include limited usability requiring additional procedures for preparation, and high costs. Recent progress of computer vision technologies will solve part of these issues.For wider spread of these technologies in clinical environment, further improvement of usability, cost reduction, and accumulation of clinical evidences demonstrating efficacy from both clinical and economical point of view are required. - Biography
Ichiro Sakuma received B.S., M.S., and Ph.D. degrees in precision machinery engineering from the University of Tokyo, Tokyo, Japan, in 1982, 1984, and 1989, respectively. He was Research Associate (1987), Associate Professor (1991) at the Department of Applied Electronic Engineering, Tokyo Denki University, Saitama, Japan. He was research instructor at Department of Surgery, Baylor College of Medicine, Houston, Texas from 1990 to 1991. He was Associate Professor at Department of Precision Engineering (1998), Associate Professor (1999) and Professor (2001), Graduate School of Frontier Sciences, the University of Tokyo. He is currently a Professor at Department of Bioengineering, Department of Precision Engineering, Director of Medical Device Development and Regulation Research Center, and Vice dean, School of Engineering, the University of Tokyo. He is the immediate past president of Japanese Society for Medical and Biological Engineering (JSMBE) (2014-2016). He is also Deputy Director for Medical Devices, Center for Product Evaluation, Pharmaceuticals and Medical Devices Agency (PMDA)His research interests includes 1) Computer Aided Surgery, 2) Medical Robotics and medical devise for minimally invasive therapy, 3) Analysis of cardiac arrhythmia phenomena and control of arrhythmia, and 4) Regulatory sciences for medical device development.He received various academic awards including, The Japan Society of Computer Aided Surgery, Best Paper Award (2006), Robotic Society of Japan, Best Paper Award (2010, 2015). In 2014, his group’s research was selected in 2014 as one of the most exciting peer-reviewed optics research to have emerged over the past 12 months by Photonics and Optics News (OSA)

Ken Masamune, Tokyo Women’s Medical University
- OPEN PLATFORM OF MEDICAL ROBOTS/ DEVICES WITH SMART CYBER OPERATING THEATER (SCOT): DESIGN CONCEPT AND PROTOTYPE ROBOT DEVELOPMENTS
- Abstract
Nowadays, several medical devices/systems including imaging machine, anesthesia, navigation system, biomonitoring devices, surgical bed, medical robots, et al., are installed in the operation room, however, it is unpleasant situation that all devices are performed in stand-alone mode, without time-synchronization, and it is difficult to combine/analyze some set of information from devices to make surgeon’s decision during surgery. To improve this situation, we’ve been developing an integrated operating room named “Smart Cyber Operating Theater (SCOT) with middleware ORiN system. In this presentation, we introduce a current SCOT project and the design concept of new open platform architecture for the integration of master/slave robotic devices and information guided robot especially for oral and maxillofacial surgery. This design will accelerate the development of any types of robotic interfaces/end effectors with fast validation. - Biography
Ken Masamune received the Ph.D. degree in precision machinery engineering from the University of Tokyo, Japan, in 1999. From 1995 to 1999, he was a Research Associate in the Department of Precision Machinery Engineering, the University of Tokyo. From 2000 to 2004, he was an Assistant Professor in the Department of Biotechnology, Tokyo Denki University, Tokyo. Since 2005, he has been an Associate Professor in the Department of Mechanoinformatics, Graduate School of Information Science and Technology, the University of Tokyo. His current research interests include computer-aided surgery, especially medical robotics and visualization devices and systems for surgery.

Jaesung Hong, Daegu Gyeongbuk Institute of Science and Technology
- AUGMENTED REALITY FOR SURGICAL NAVIGATION
- Abstract
In these days, augmented reality (AR) has become a key technology for surgical navigation. Using the AR technology, the shape of invisible organs are overlapped to the visible endoscopic or microscopic images. Therefore the surgeon can avoid damaging the healthy tissue, and reduce the incision area. In the AR-based surgery, optical tracker and camera are generally used. Optical tracker can measure the position and pose of multiple markers, and the relationship between the camera and target organs of patient can be measured in real-time by tracking of the markers which are mounted on the camera body and the patient. In the AR display, finding the relationship between the optical marker mounted on the camera body and the center of camera (camera registration) is particulary important. This relationship strongly affects the overall accuracy of AR display. In this talk, the latest AR technologies applied for the surgical navigation are introduced. - Biography
Jaesung Hong is an associate professor and the Department Chair of Robotics Engineering at the Daegu Gyeongbuk Institute of Science and Technology (DGIST), South Korea. His research area is medical imaging and medical robotics for minimally invasive surgery.
At the University of Tokyo, he has developed the world first US-guided needle insertion robot tracking a movable and deformable organ. This was reported in Physics in Medicine and Biololgy in 2004, and has been frequently cited (> 160). While he worked at Kyushu University Hospital in Japan, he developed various customized surgical navigation systems, which were clinically applied in approximately 120 surgeries. These included percutaneous ablation therapies for liver tumors, cochlear implant surgeries, neurosurgeries for gliomas, and dental implant surgeries.
After moving to DGIST which is a research-oriented special university supported by Korean government, he developed a single port surgery robot and its master device for high force transimisson and large workspace as well as a portable, AR-based surgical navigation system, which has been tested in tibia tumor resections and orthognathic surgeries in collaboration with major Korean hospitals, including the Seoul National University Hospital of Bundang, Samsung Seoul Hospital, etc. He is one of a small number of specialists who is familiar with both engineering and clinical medicine.
Until 2016, Prof. Hong has published approximately 42 journal papers including 30 SCI/SCIE papers with impact factors. Six of them are top 10% ranked journal papers. He also submitted or registered 15 domestic and 7 international patents. He has received 9 best paper/presentation awards, in addition to obtaining 10 research funds amounting to approximately 4.5M USD (including planned budgets).

Ka-Wai Kwok, University of Hong Kong
- MR-COMPATIBLE ROBOTIC SYSTEMS: TOWARDS THE INTRAOPERATIVE MRI-GUIDED INTERVENTIONS
- Abstract
Advanced surgical robotics has attracted significant research interest in supporting image guidance, even magnetic resonance imaging (MRI) for effective navigation of surgical instruments. In situ effective guidance of access routes to the target anatomy, rendered based on imaging data, can enable a distinct awareness of the position of robotic instrument tip relative to the target anatomy in various types of minimally invasive interventions. Therefore, such MRI-guided robots will rely on real-time processing the co-registration of surgical plan with the imaging data captured during the intervention, as well as computing the relative configuration between the instrument and the anatomy of surgical interest.
This talk will present a compact robotic system capable to operate inside the bore of MRI scanner, as well as its solutions to technical challenges of providing a safe, effective catheter-based surgical manipulation. The proposed image processing system demonstrates its clinical potential of enhanced surgical safety by imposing visual feedback on tele-operated robotic instruments even under large-scale and rapid tissue deformations in soft tissue surgeries, such as cardiac electrophysiology and stereotactic neurosurgery. The ultimate research objective is to enable the operator to perform safe, precise and effective control of robotics instruments with the aid of pre- and intra-operative MRI models. The present work will be timely to bridge the current technical gap between MRI and surgical robotic control. - Biography
Dr. Ka-Wai Kwok is currently assistant professor in Department of Mechanical Engineering, The University of Hong Kong, who completed his PhD training in The Hamlyn Centre for Robotic Surgery, Imperial College London in 2011, where he continued research on surgical robotics as a postdoctoral fellow. After then, Dr. Kwok obtained the Croucher Foundation Fellowship 2013-14, which supported his research jointly hosted by The University of Georgia, and Brigham and Women’s Hospital – Harvard Medical School. His research interests focus on surgical robotics, intra-operative medical image processing, and their uses of high-performance computing techniques. To date, he has been involved in various designs of surgical robotic devices and interfaces for endoscopy, laparoscopy, stereotactic and intra-cardiac catheter interventions. His work has also been recognized by several awards from IEEE international conferences, including ICRA’14, IROS’13 and FCCM’11. He also became the recipient of Early Career Awards 2015/16 offered by Research Grants Council (RGC) of Hong Kong.
Hongliang Ren, National University of Singapore, Singapore
- TOWARDS MAGNETIC ACTUATED MICROROBOTIC NEEDLESS INJECTION
- Abstract
The feasibility of a needleless magnetic-actuated device for the purpose of intravitreal injections is investigated using three different design prototypes.
A needleless device could potentially significantly reduce patient anxiety levels and occurrences of needle stick injuries to both healthcare workers and patients Moreover, a magnetic-actuated device allows for control of the current supplied over time to the device and the corresponding depth of penetration of the drug.
Substitutes for the sclera and vitreous region were used in the experiments where a blue dye was injected using the two separate devices to identify if these devices were able to eject the liquid with enough force needed to penetrate the sclera and deliver the liquid to within the vitreous region and whether there was a relationship between the current supplied to the devices and the depth of delivery The solenoid prototype injector was not able to eject the liquid at a force required to penetrate the sclera although, because the vitreous region was a lot softer, a follow through current was predicted to be able to deliver the bulk of the liquid to the middle portion of the vitreous substitute used in this experiment. Moreover, the addition of a controller to the system was able to produce a two part force to the liquid, the initial peak force meant to penetrate the sclera and a follow through force to deliver the drug to the vitreous region only. - Biography
Dr. Hongliang Ren is currently an assistant professor and leading a research group on medical mechatronics in the Biomedical Engineering Department of National University of Singapore (NUS). He is an affiliated Principal Investigator for the Singapore Institute of Neurotechnology (SINAPSE) and Advanced Robotics Center at National University of Singapore. Dr. Ren received his PhD in Electronic Engineering (Specialized in Biomedical Engineering) from The Chinese University of Hong Kong (CUHK) in 2008. After his graduation, he worked as a Research Fellow in the Laboratory for Computational Sensing and Robotics (LCSR) and the Engineering Center for Computer-Integrated Surgical Systems and Technology (ERC-CISST), Department of Biomedical Engineering and Department of Computer Science, The Johns Hopkins University, Baltimore, MD, USA, from 2008 to 2010. In 2010, he joined the Pediatric Cardiac Biorobotics Lab, Department of Cardiovascular Surgery, Children’s Hospital Boston & Harvard Medical School, USA, for investigating the beating heart robotic surgery system. Prior to joining NUS, he also worked in 2012 on a collaborative computer integrated surgery project, at the Surgical Innovation Institute of Children’s National Medical Center, USA. His main areas of interest include Biomedical Mechatronics, Computer-Integrated Surgery, and Dynamic Positioning in Medicine.
Best Paper Finalist award at ICMA 2016 Conference
Our team’s research paper titled “Investigation of a Stiffness Varying Mechanism for Flexible Robotic System” paper was presented and shortlisted for the Best Conference Paper at 2016 IEEE International Conference on Mechatronics and Automation (ICMA 2016), Aug 7-10, 2016, China.

ICIA 2016
Members of our research staff were actively involved at ICIA2016, IEEE International Conference on Information and Automation in Ningbo, China from Jul 31 to Aug 4. Dr. Ren was the Program Chair of the organizing committee and also presented our recent papers in soft and flexible robotics.
