When a robot is required to perform specific tasks defined in the world frame, there is a need for finding the coordinate transformation between the kinematic base frame of the robot and the world frame. The kinematic base frame used by the robot controller to define and evaluate the kinematics may deviate from the mechanical base frame constructed based on structural features. Besides, by using kinematic modeling rules such as the product of exponentials (POE) formula, the base frame can be arbitrarily located, and does not have to be related to any feature of the mechanical structure. As a result, the kinematic base frame cannot be measured directly. This paper proposes to find the kinematic base frame by solving a hand-eye calibration problem using 3D position measurements only, which avoids the inconvenience and inaccuracy of measuring orientations and thus significantly facilitates practical operations. A closed-form solution and an iterative solution are explicitly formulated and proved effective by simulations. Comprehensive analyses of the impact of key parameters to the accuracy of the solution are also carried out, providing four guidelines to better conduct practical operations. Finally, experiments on a 7-DOF industrial robot are performed with an optical tracking system to demonstrate the superiority of the proposed method using position data only over the method using full pose data.
Flexible robotic manipulators have been widely used in minimally invasive surgery (MIS) and many other applications requiring closer inspection and operation. Although a variety of manipulators enabled by different mechanism have been developed, few of them can preserve softness, thinness and decent bending capability simultaneously. We develop miniature soft robotic manipulators made of hyper-elastic silicone rubber. Along with the manipulator design, novel fabrication methods are proposed and elaborated. Detailed characterizations are specified to show the bending capability of the manipulator given different air pressure. Specifically, our manipulator, as thin as 6 mm, is able to achieve 360° directional bending, and, when given pressure over 70kPa, it can reach 180° bending angle and around 5mm bending radius easily. Due to its innate compliance and small dimension, this type of robotic manipulator can deliver safe and comfortable interactions with the subjects. More significantly, the novel fabrications in this paper diversify the fabrication methods for soft pneumatic robots and actuators (SPRA) and further scale down their sizes. Continue reading
Light pipe is a tool providing illumination for delicate operations inside the eyeball in an eye surgery. Traditional light pipes with straight shafts have to be reoriented in order to enlarge its illustration range, which implies more risk of damage to the sclera and requires greater operation space for the handle. In order to overcome these limitations, this paper has proposed a novel robotized handheld light pipe based on concentric tubular structure. Tube parameters are selected based on the anatomical dimension of eyeballs. Novel actuation designs are described to meet the requirements of the intraocular procedures. Intuitive control scheme is implemented to facilitate surgeons’ operations. Furthermore, the benefit of the precurved tube compared with that of a straight tube is evaluated through experiments. It has been demonstrated that the proposed design as a light pipe holds the promise of enhancing intraocular surgeries.
The overall objective of this project is to develop and evaluate the key technologies of Transnasal Artificial Tentacles, a new approach involving research on the tentacle-like robotic and sensing technologies. This is aiming to create a compliant, flexible, multiple-sensorized, immersive, intraoperative targeting and guidance system for constrained transnasal endoscopic surgeries in a confined workspace.
Minimally invasive surgery-based nasopharyngeal cancer treatment is promising, but currently, it is not a common treatment choice because of the absence of suitable tools. In this project, a multi-channel concentric tube robot is proposed for the treatment of nasopharyngeal cancer based on natural orifice translumenal endoscopic surgery. The proposed system has three channels, i.e. two manipulation channels and one vision channel, and all the three channels are confined by a 10 mm active sheath. The robot is controlled by human-in-the-loop bimanual teleoperation under active endoscopic guidance. The reduced sheath diameter and the steerable vision channel improve the functionality of the system and distinguish our design from the prior art. The feasibility of the system has been evaluated through a series of simulations and experiments. Results show that the proposed system is capable to conduct cooperative tasks in a confined space and the miniaturized manipulator is suitable for transnasal procedures. Besides, comparisons with other types of flexible surgical robots are discussed to further demonstrate the superiority of the proposed system in the target clinical applications.
Funding
Singapore Millennium Foundation
PI: Jan/11/2015 – Jan/10/2018
PUBLICATIONS
Yu H, Wu L, Wu K, Lim CM and Ren H (2016), “Development of a Multi-Channel Concentric Tube Robotic System With Active Vision for Transnasal Nasopharyngeal Carcinoma Procedures”, IEEE Robotics and Automation Letters., Jan, 2016. Vol. 1(2), pp. 1172-1178.
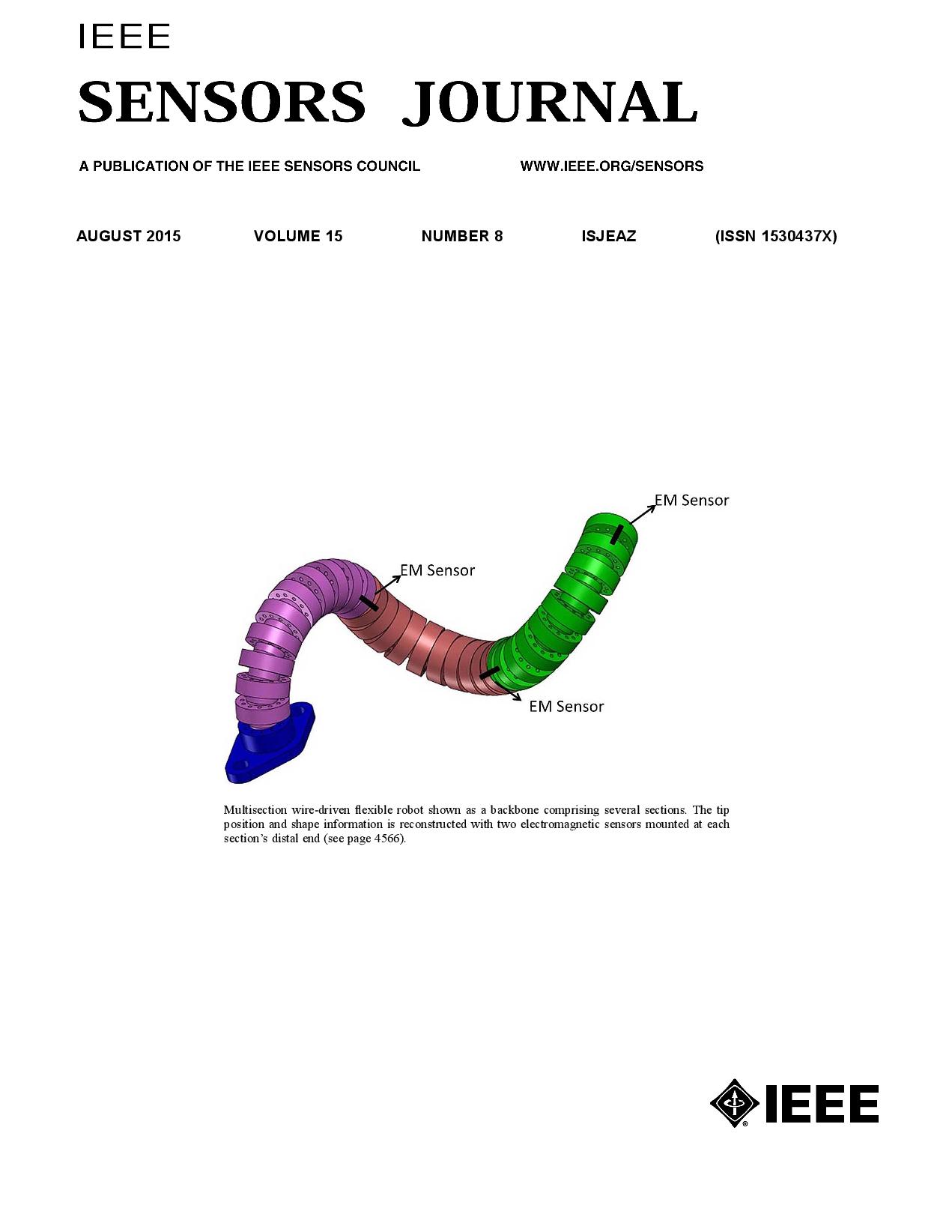
Out of 72 articles in the same issue, our paper on flexible robotic sensing, entitled “Electromagnetic Positioning for Tip Tracking and Shape Sensing of Flexible Robots”, was featured on the cover of IEEE Sensor Journal, (Volume:15 , Issue: 8, Issue Date: Aug. 2015).
Nasopharynx cancer, or nasopharyngeal carcinoma (NPC), is a tumor that originates in the nasopharynx, the uppermost region of the pharynx where the nasal passage and the throat join. It is a common disease occurring to ethnic Chinese people living in or emigrating from southern China; it is also the eighth most frequently occurred cancer among Singaporean men. Traditional posterior nasopharyngeal biopsy using a flexible nasal endoscope has the risks of abrasion and injury to the nasal mucosa and thus causing trauma to the patient. Therefore, the goal of this project is to develop a compact continuum tubular robotic system to achieve collision free nasopharyngeal biopsy.
Fig.1 Illustration of the proposed CTR for nasopharyngeal biopsy.
Approaches
We developed a compact CTR which is 35 cm in total length, 10 cm in diameter, 2.15 kg in weight, and easy to be integrated with a robotic arm to perform more complicated operations.
Fig.2 The proposed continuum tubular robot
Fig.3 Compact and light weight CTR integrated with a positioning arm for
better conducting surgery
We also developed a 3D printed biopsy needle to equip our robot for transnasal biopsy procedure.
Fig.4 3D printed biopsy needle for transnasal biopsy
The workspace of the robot was analyzed to determine optimized tube parameters.
Fig.5 Workspace comparison for 3-DOF CTR with three initial configurations.
Top: all the outstretched part of the inner tube exposes; Middle: the outstretched part of the inner tube is partially covered by the outer tube; Bottom: the outstretched part of the inner tube is totally covered by the outer tube.
Further more, by using an electromagnetic tracking system, we are able to build a navigation system with shape reconstruction for the tubes.
Fig.6 Shape reconstruction using 3-order Bézier curve fitting
Fig.7 Sensing by EM tracker
Fig.8 Navigation interface
Results
Three groups of experiments were carried out. The first group is to tele-operate the robot to follow a linear path and a circular path. We found that the path following accuracy was about 2 mm.
Fig.9 Tele-operating the robot to follow a linear path and a circular path
Fig.10 Accuracy of the robot following the predefined paths
The second group is to validate the shape reconstruction algorithm. The accuracy of the results is about 1 mm.
Fig.11 Reconstruction setup
Fig.12 Reconstruction error
In the last group of experiments, the robot was tested in a biopsy procedure on a cadaver. The feasibility of the proposed robotic system was validated.
Fig.13 Cadaver experiment setup
Fig.14 Cadaver experiment process
People Involved
Research Fellow: Liao Wu
PhD Student: Keyu Wu
FYP Student: Li Ting Lynette Teo
Intern Student: Jan Feiling and Xin Liu
Project Investigator: Hongliang Ren
Publications
[1] Liao Wu, Shuang Song, Keyu Wu, Chwee Ming Lim, Hongliang Ren. Development of a compact continuum tubular robotic system for nasopharyngeal biopsy. Medical & Biological Engineering & Computing. 2016.
[2] Keyu Wu, Liao Wu, Hongliang Ren. Motion planning of continuum tubular robots based on features extracted from statistical atlas. In: Proceedings of 2015 IEEE International Conference on Intelligent Robots and Systems (IROS 2015).
[3] Keyu Wu, Liao Wu, Chwee Ming Lim, Hongliang Ren. Model-free image guidance for intelligent tubular robots with pre-clinical feasibility study: towards minimally invasive trans-orifice surgery. In: Proceedings of 2015 IEEE International Conference on Information and Automation (ICIA 2015). ( best paper finalist)
[4] Benedict Tan, Liao Wu, Hongliang Ren. Prototype development of a handheld tubular curvilinear robot for minimally invasive surgery. In: The 11th Asian Conference on Computer Aided Surgery (ACCAS 2015).
[5] Keyu Wu†, Liao Wu†, Hongliang Ren. An image based targeting method to guide a curvilinear concentric tube robot. In: Proceedings of 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014). Bali, Indonesia, 2014: 386-391 († equally contributed author).
A constrained tendon-driven serpentine manipulator is developed in our previous work, high level intelligence is expected to make manipulator system working autonomously. Considering the limited and confined working space of surgical operation, this project is aim to develop novel motion planning techniques for our surgical tendon-driven serpentine manipulator, which is expected to assist surgeon operation more accurate and convenience.
Approaches
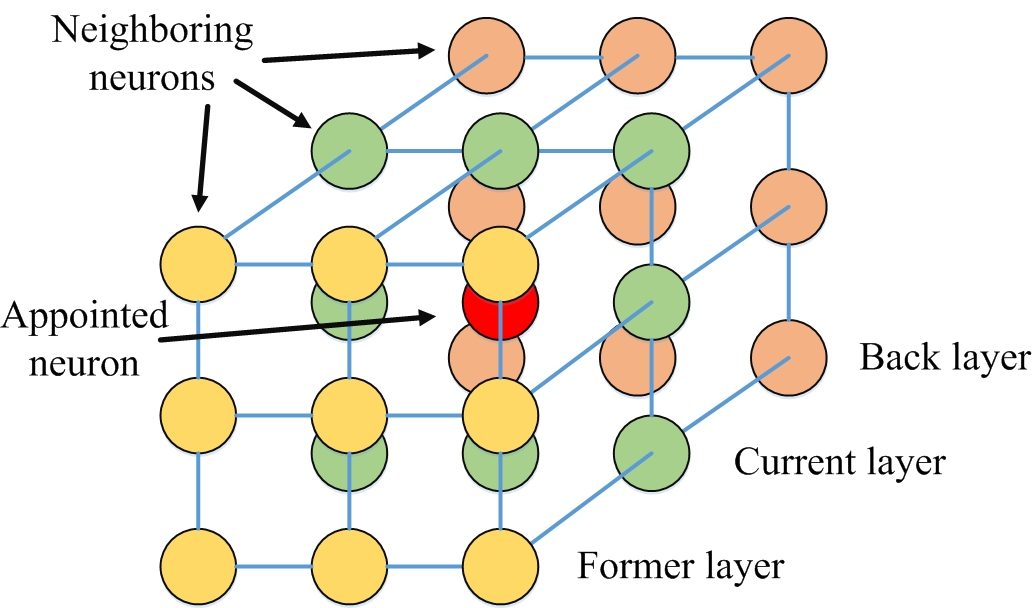
In the clinical environment, chances are high that the manipulator may bump into neighboring tissue and organs and cause additional damages. For medical manipulator working within human body, optimal and accurate trajectory planning is the key enabler of surgical security because of any additional damage to proper functioning organs is intolerable. Moreover, the surgery usually has many additional disturbances including breathe, physical hand tremor and tiny displacement of the organs. These uncertainties require the planning algorithm to have good robustness to avoid damaging the proper functioning organs. As the most important factor that can lower the risk of additional damages, less sweeping area of manipulator motion results in more disturbances tolerance capability. Especially when energy cost of different planned trajectories are in the same level, the less sweeping area of whole manipulator body becomes more attractive for physician and reduce unpredictable risks in transoral procedure applications. Therefore, we propose a three dimensional neural dynamic planning algorithm which introduces sweeping area as a very important factor in neural stimulation propagation.
The three dimensional neural network is show in Figure 1, each neuron is connected with its adjacent 26 neurons. In our minimum planning model, the start state with highest activity propagates stimulation to whole network through connective weight. On the other hand, the configuration parameters representing obstacle collision hold the lowest value and do not connect with neighboring neurons. As a result, the neural stimulation spread as water ran down from a height place in planning neural dynamic field building, which is shown in Figure 2. Simultaneously, the robot starts from target state and looks for the highest state as climbing mountain. When robot reach the start state configuration parameter, the planning is finished. Then, the final motion sequence will be obtained by reversing the planned trajectory, which is from start state to target state.
Fig.1 Three dimensional neural dynamic model
Fig.2 Neural dynamic field, which stimulation spread from start state to whole map.
Results
At first, we test our planning algorithm in representative simulation scenarios and compare with other famous planning algorithms, such as traditional neural dynamic planning algorithm, RRT and RRT*.
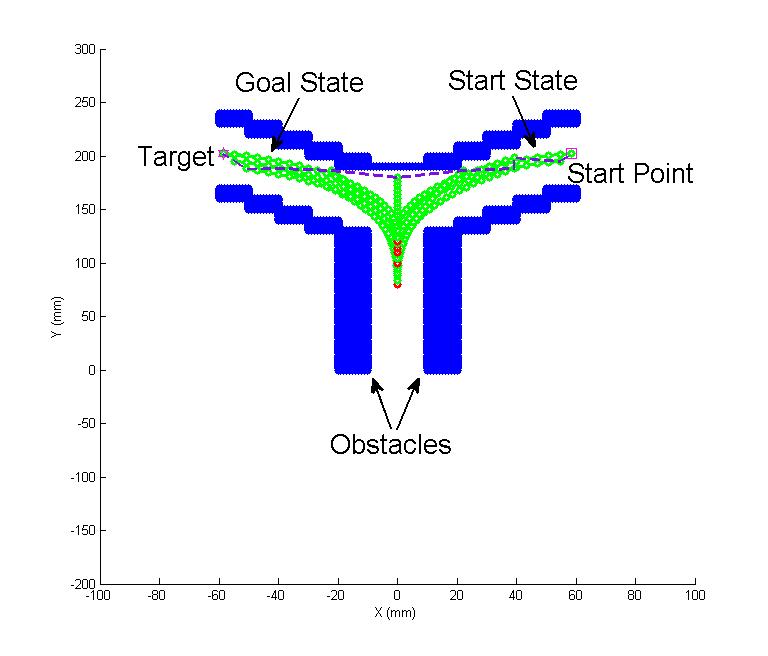
(a) Minimum sweeping area planning algorithm
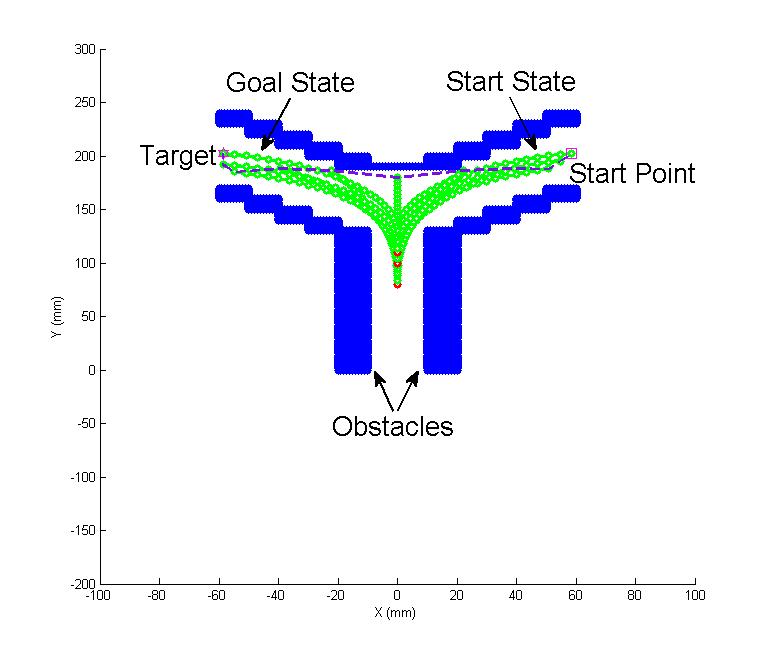
(b) Neural dynamic algorithm
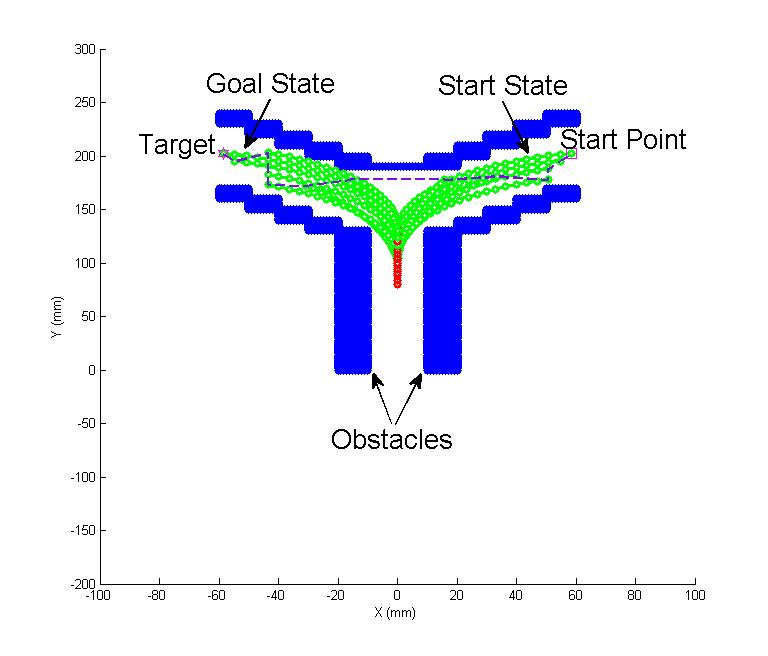
(c) RRT*
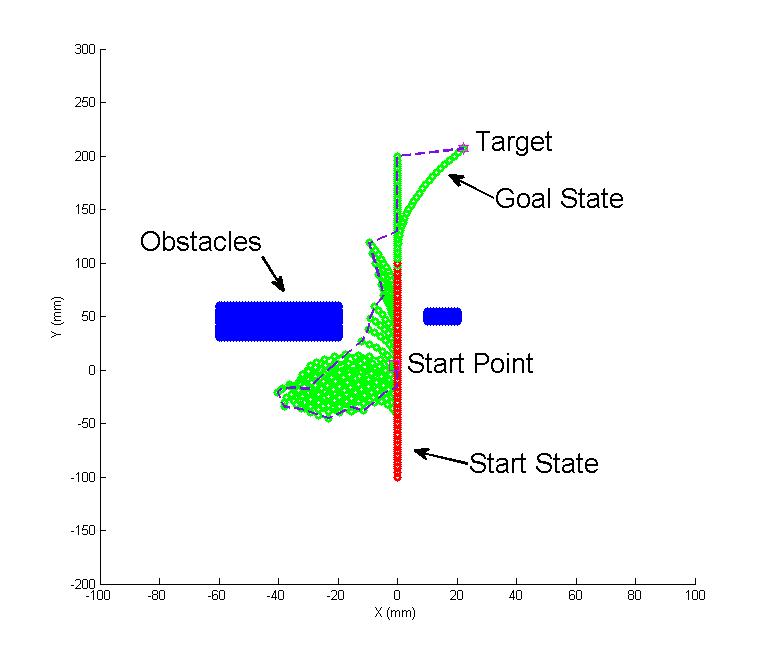
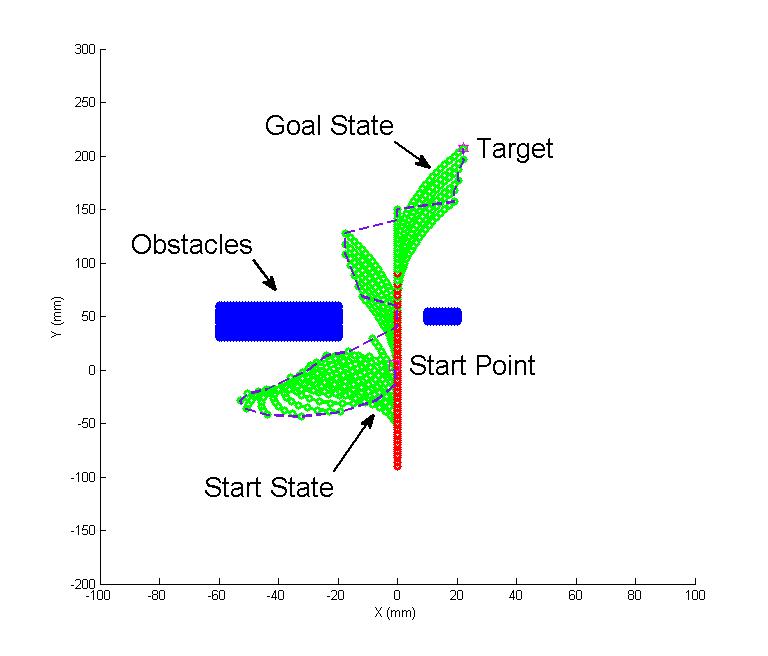
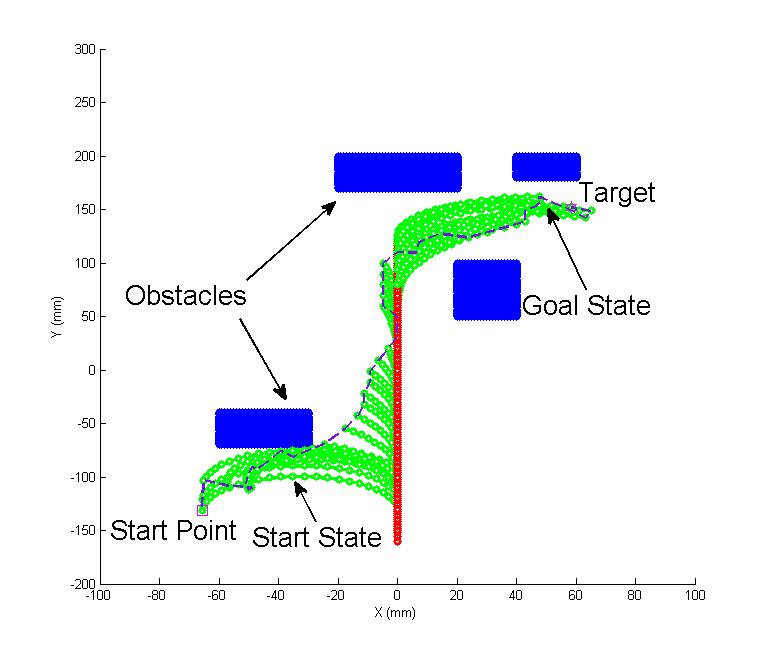
Fig.3 Simple case: a comparison simulation on a simple scenario consisting of two obstacles in the middle of the map is used for first test. The tendon-driven serpentine manipulator is left bended at the beginning and expected to reach the upper right target point. The manipulator is presented by green color (free bending segments) and red color (constrained bending segments). The distal tip trajectory is presented by a dash line. The performance of different planning algorithms in terms of sweeping area and obstacle avoidance ability are shown. Particularly, the area of green parts can be seen as the sweeping area of manipulator approximately
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
(c) RRT*
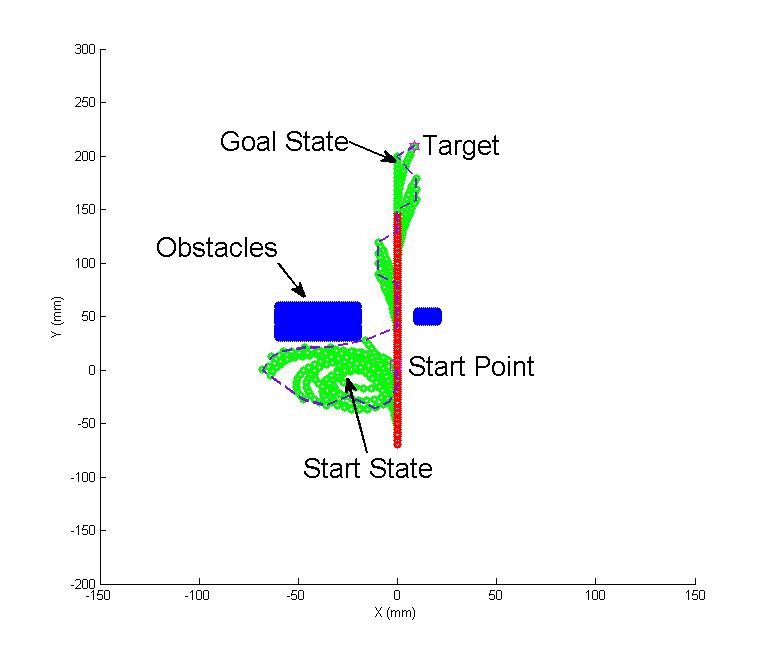
Fig.4 Complex case: a comparison simulation on a complex scenario consisting of four obstacles are used for test. The
tendon-driven serpentine manipulator is left bended at the beginning and expected to reach the target point surrounded by three obstacles in the upper right area. The differences in sweeping area and obstacle avoidance ability are shown obviously among different algorithms guidance.
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
(c) RRT*
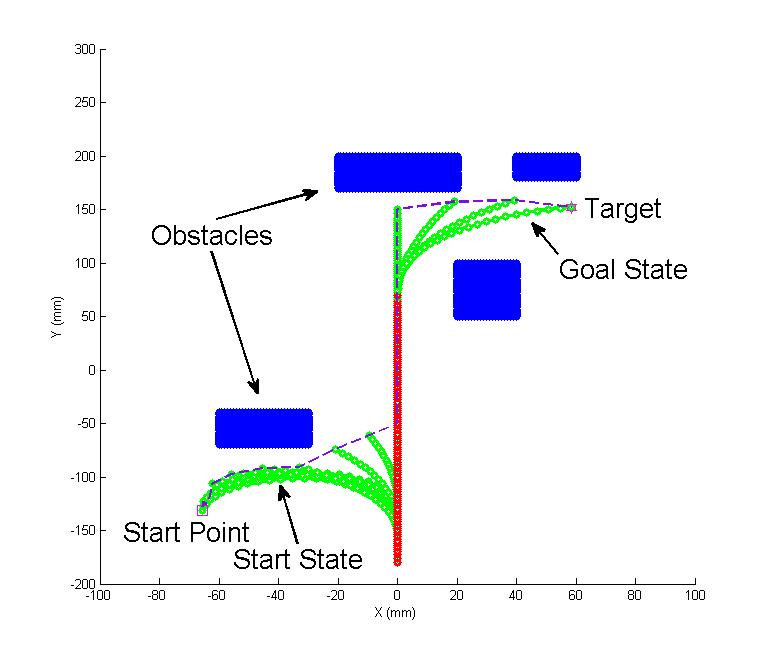
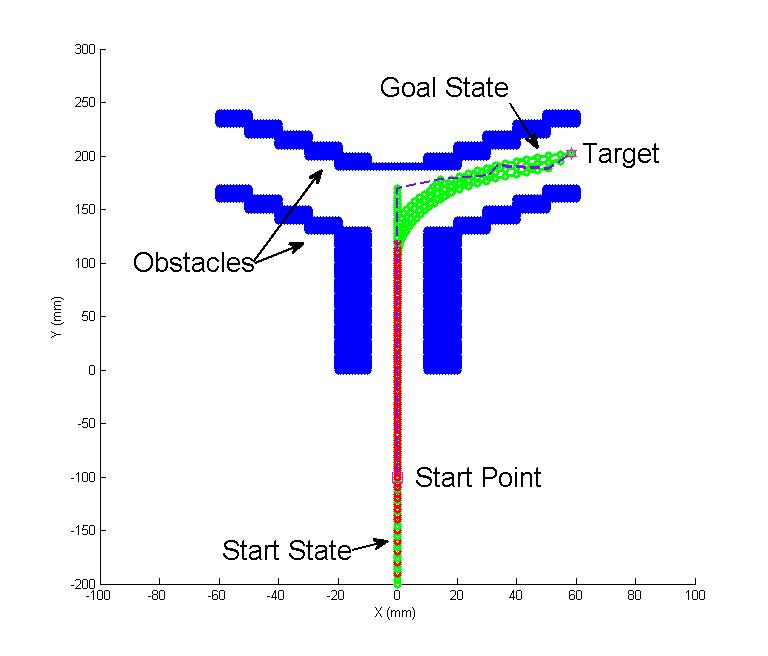
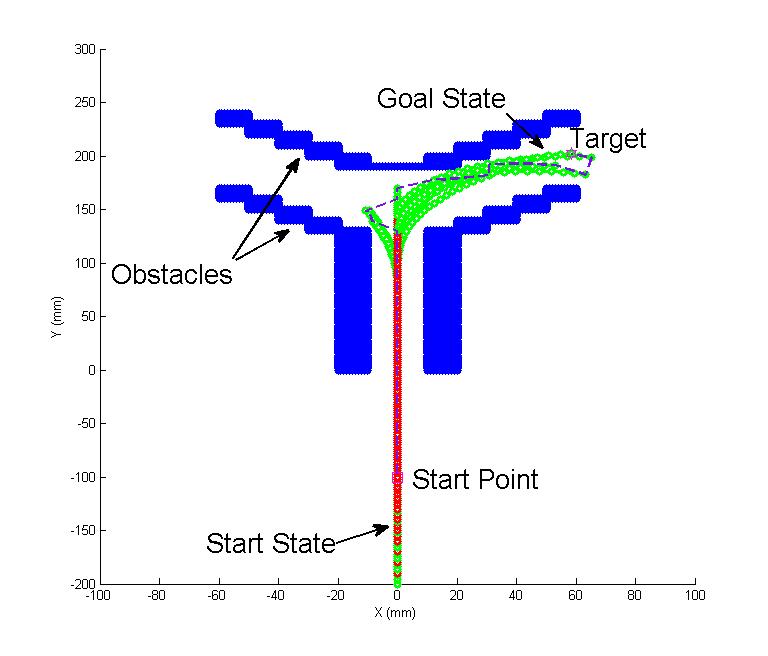
Fig.5 Tubular case 1: A virtual tubular clinical map in simulation is conducted in advance, where target is at the right side sub-branch. The tendon-driven serpentine manipulator is straight on the bottom of the tubular at the beginning.
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
(c) RRT*
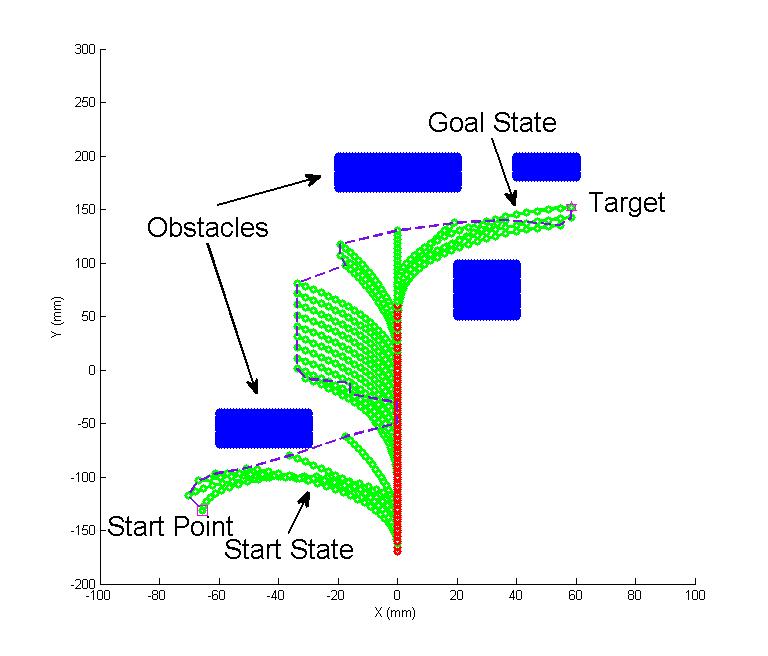
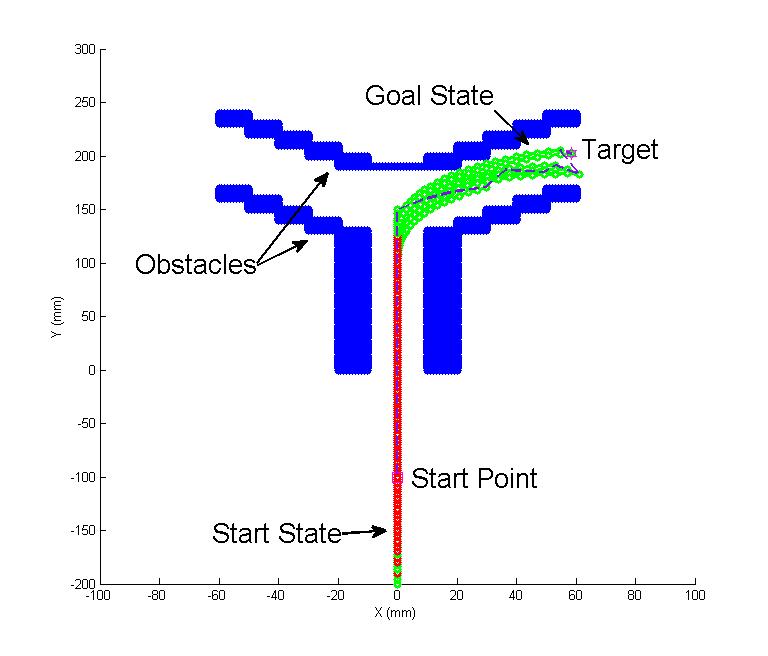
Fig.6 Tubular case 2: The same virtual tubular clinical map as Tubular case 1, but target is at the left side sub-branch and start point at the right side sub-branch. The tendon-driven serpentine manipulator is expected to move from right sub-branch to left one as manipulator moving in clinical operation.
Moreover, experiments are conducted in environments built by Lego blocks, where obstacle configurations are similar to simulation cases. In this experiment stage, the tendon-driven serpentine manipulator is expected to execute same motion sequences that are generated from complex case, tubular case 1 and tubular case 2 in simulation studies. The experimental results in phantom test are shown in video 2 (Phantom test on Lego bricks).
Finally, a preliminary transoral trials on cadaver human head is conducted to at Khoo Teck Puat Advanced Surgery Training Centre (ASTC), National University of Hospital, Singapore. The panorama of cadaver transoral experiments can be found in video 3. The operations on compute and corresponding softwares are shown in video 4. The experimental data are ploted by MATLAB, and four algorithms comparisons are shown in video 5.
[1] Yanjie Chen, Zheng Li, Wenjun Xu, Hang Zhong, Yaonan Wang and Hongliang Ren, “Minimum Sweeping Area Motion Planning for Flexible Serpentine Surgical Manipulator with Kinematic Constraints”, IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2015), Accepted.
[2] Yanjie Chen, Wenjun Xu, Zheng Li, Shuang Song, Chwee Ming Lim, Yaonan Wang, and Hongliang Ren, “Safety-Enhanced Motion Planning with Minimum Sweeping Area for Flexible Surgical Manipulators using Neural Dynamics”, IEEE Transactions on Cybernetics, Submitted.
Videos
-Support powerpoint.
-Phantom test on Lego bricks.
-The panorama of cadaveric transoral experiments.
-The compute vision and corresponding software during clinical experiments.
Our project on intelligent tube robot was invited to demo at the COLLABORATIVE RESEARCH MEETING WITH NUH NEUROLOGY AND NEUROSURGERY at SINAPSE this Friday.
9:30AM, Zheng Li, Chinese University of Hong Kong, Hong Kong
10AM, Chwee Ming Lim, National University Hospital, National University of Singapore, Singapore
— 10:30AM-10:45AM, Coffee break—
10:45AM, Hongbin Liu, King’s College London, UK
11:15AM, Sebastian Matich, Technische Universität Darmstadt, Germany
12PM, Sarthak Misra, University of Twente, Netherlands
— 12:30, Lunch break & SINAPSE Tour—
2:30PM, Leonardo De Mattos, Istituto Italiano di Tecnologia, Italy
3PM, Wooram Park, University of Texas at Dallas, USA
— 3:30PM-3:45PM, Coffee break —
3:45PM, Etsuko Kobayashi, University of Tokyo, Japan
4:15PM, Kevin Cleary, Children’s National Medical Center, USA
4:45PM, Hongliang Ren, National University of Singapore, Singapore
— 6PM, Social Event —
Topics
Zheng Li, Chinese University of Hong Kong, Hong Kong
Surgical Robot: from Rigid to Flexible – a mechanical point of view
Abstract
Surgical robots, represented by the da Vinci Surgical System, has been increasingly used in the operating theatres. Benefits of the robot include: increased precision, finer movement, improved dexterity, reduced tremor, better vision, capable of remote-operation, etc. These benefits are attributed to multiple factors, mechanical design, advanced control, imaging, communication, etc. Mechanical design or the structure is fundamental. It defines the reachable workspace as well as dexterity of the end effector. From the structure point of view, current surgical arms could be divided into rigid arms and flexible arms. Rigid arms, like the Endowrist instruments of da Vinci surgical system, contains a rigid slim shaft and a wrist. During the operation the shaft pivots about the trocar to reposition the end effector. The consequence is small internal workspace, large external operation space and possible tear of the incision. Flexible arms, on the other hand, could bend inside the cavity. This increases the workspace and alleviates the need for pivoting. For semi-flexible surgical arms the shaft is still rigid. At the distal end of the shaft is a flexible bending section. They are mostly used in MIS, LESS and SPA surgeries. When the shaft becomes flexible as well, the surgical arm could navigate through natural orifice and performing NOTES. Due to the benefits of flexible surgical arms, much effort has been devoted to developing flexible surgical robots globally. A few flexible surgical robots have received FDA approval. It is believed that in the near future, a lot more would go into the operating theatre. In this presentation, the current status of flexible surgical robots research will be introduced. Also, some of my research on flexible mechanisms will be shared.
Biography
Zheng Li received his B.S and M.S degrees in Mechanical Engineering from Beihang University, China, and his Ph.D. degree in Mechanical and Automation Engineering from the Chinese University of Hong Kong, Hong Kong SAR, in 2007, 2010, and 2013 respectively. Now he is a research assistant professor in the institute of Digestive Disease and Chow Yuk Ho Technology Centre for Innovative Medicine, The Chinese University of Hong Kong. His current research mainly focuses on the topic of medical robots, including flexible surgical robot, active capsule-like robots and bio-inspired robots. He is a member of IEEE and ASME. In the past years, he served as committee member of a number of conferences, such as Robio, ICIA and CCECE, and reviewer of several journals, such as IEEE/ASME T-MECH, Robotics and Biomimetics, Journal of Intelligent and Robotic systems. He is the author of one book, three book chapters, over 30 journal/conference papers, and a number of patents/copyrights. He won the best paper finalist of Robio 2012, CCECE 2015, Conference paper award of CCECE 2015, First prize of 13th Challenge Cup, Champion of 2013 CUHK Professor Charlse K. Kao Student Creativity Awards, etc.
Current status of robotic head and neck surgery in Singapore
Abstract
Robotic assisted head and neck surgery is a new surgical aramentarium in the management of both benign and malignant head and neck disease. Trans-oral robotic surgery (TORS) has been utilized in the resection of early T1/T2 oropharyngeal cancer, as well as removing deep-seated tumors such as parapharyngeal space tumors and supraglottic/hypopharyngeal tumors. Additionally, accessing thyroid nodules or benign tumors in the neck can be made from a remote access incision such as the trans-axillary or retro-auricular (or modified facelift). These new techniques open a new paradigm in the surgical management of head and neck diseases and the current adoption of the technology in an academic tertiary medical centre will be presented.
Biography
Dr Lim graduated from the Faculty of Medicine, National University of Singapore in 1998. He underwent residency in Otolaryngology in Singapore and was awarded the Gold medal for the MRCS (Edinburgh) General Surgery examination in 2003, and subsequently the Gold medal award by the College of Surgeons for the best performing resident in the exit examination organised by the Specialist Training Committee in Otolaryngology in 2009. After completing his specialist training, Dr Lim joined the Department of Otolaryngology – Head and Neck Surgery in NUH as an Associate Consultant. He started his practice and pursued further training in head and neck oncologic surgery at the National University Health System, Singapore. In 2010, he was awarded the Ministry of Health Overseas Training award and pursued a 2-year Head and Neck Oncologic Fellowship at the University of Pittsburgh Medical Center in the United States of America. This fellowship is accredited by the Advanced Training Council of the American Head and Neck Society. During these 2 years, Dr Lim did translational benchwork research in immunotherapy in head and neck cancer, focusing on immunological mechanisms in monoclonal antibody based therapy in cancer and identifying novel immune modifiers in cancer therapy. In his clinical training, Dr Lim was trained in transoral robotic surgery (TORS), minimally invasive video assisted thyroidectomy (MIVAT) and minimally invasive approaches in head and neck surgery, in addition to the major head and neck resections. Upon his return to Singapore in 2012, he was appointed Consultant at the Department of Otolaryngology – Head and Neck Surgery, NUH, and Assistant Professor at the Yong Loo Lin School of Medicine, NUS.
A catheter robot for semi-autonomous cardiac ablation
Abstract
Catheter ablation is a widely used minimally invasive procedure to treat arrhythmias when medications are unable to restore the normal heart rhythm. However, this is a highly skilled procedure, requiring extensive training, and may take many hours for a single procedure even in the most experienced hands. Robotics technology provides promising solutions to increase the accessibility of this treatment modality, and to assist training. However, existing robotic solutions remain unable to reduce the procedure time notably and the associated high cost precludes their widespread use. To address the above issues, in a new catheter steering robot for ablation procedures are being developed at King’s College London. This talk introduces the design of the catheter robot, the semi-autonomous catheter navigation control, and the contact force estimation based on shape tracking. The initial results show that robot can improve the current catheter ablation procedure in terms of both reducing the procedure time and increasing the ablation accuracy, with cost-effective design features.
Biography
Hongbin Liu is currently a lecturer (Assistant Professor) in the Centre for Robotics Research, Department of Informatics, King’s College London, UK, where he is leading the Robotic Contact Perception Lab. He received his B.S. degree in 2005 from the Northwestern Polytechnique University, Xi’an, China, and received MSc in 2006 and PhD degree in robotics in 2010 both from Kings College London, UK. He is a member of IEEE and Technical Committee Member for IEEE EMBS BioRobotics. His research is focusing on enriching the robot’s perception of during medical interventions, and making use of the augmented perception to enable quicker, safer, procedure. Applications of his research include soft tissue palpation during minimally invasive surgery, interventional cardiology and endoscopy.
Sebastian Matich, Technische Universität Darmstadt, Germany
A Single Port Robotic System with parallel kinematic arms for rectal surgery
Abstract
Single-Port surgery is an innovative technique and the next step in minimally invasive surgery. Performing complex surgical procedures through only one single incision or a natural orifice is a challenging task that could be simplified by involving surgical telemanipulators. Throughout the last decade, several single-port robots where introduced. While most of these system use cable driven continuum robots to set up the intracorporeal arms the FLEXMIN device uses miniaturized parallel kinematics instead.
This talk introduces the surgical telemanipulator FLEXMIN and focuses on the design and characterisation of the parallel kinematics. Because the telemanipulator will provide haptic feedback, the results of a first realized sensor concept that uses distally located force sensors to measure the tip force is presented.
With the manufactured prototype, complex surgical procedures like suturing and knot tying can be performed. Furthermore, it is shown that this approach is capable of applying high payloads exceeding 5 N and generating dynamic movements with speeds of more than 320 mm/s and accelerations beyond 1 G.
Because of the rigidity, excellent controllability and low latency the manipulator can perform high dynamic movements with the potential to compensate the movements of organs.
Biography
Sebastian Matich received his diploma in Electrical Engineering and Information Technology from Technische Universität Darmstadt, in 2011. He is currently working as research associate at the Institute of Electromechanical Design. His main research topic is the development of small scale parallel kinematic structures for use in surgical robotics. Additional research topics are precision engineering, small drives and sensor design.
Steering Flexible Instruments using Fiber Bragg Grating Sensors
Abstract
Flexible minimally invasive surgical instruments can be used to target difficult-to-reach locations within the human body. Accurately steering these instruments requires information about the three-dimensional shape of the instrument. In this talk, we use an array of Fiber Bragg Grating (FBG) sensors to reconstruct the shape of flexible instruments, and to robotically control the instrument. FBG sensors have several advantages over existing imaging modalities, which make them well-suited for use in a clinical environment. First, an array of FBG sensors is integrated on a Nitinol wire (1 mm diameter). A bevel tip is made on the tip of the shape sensing wire, such that a flexible needle is realized which bends during insertion into tissue. This needle with FBG sensors is inserted into biological tissue, and the resulting deflected shape is reconstructed and compared with camera images. Next, the needle is used as a stylet in a novel needle design with a tendon-driven actuated-tip. Kinematic models of the needle are combined with the needle pose reconstructed from FBG sensors to steer the needle in soft-tissue simulants. FBG-based shape sensing has also been used for the control of tendon-driven continuum manipulators. We control the position of the tip of a single-segment manipulator. This is followed by a case where we use FBG sensors to control the shape of a planar manipulator with two segments. In this case, the reconstructed shape was used for both obstacle avoidance while steering the manipulator tip along a pre-defined path. Finally, we demonstrate that continuum manipulators along with FBG sensors can be used for intrinsic force sensing.
Biography
Sarthak Misra joined the University of Twente in 2009. He is currently an Associate Professor in the Department of Biomechanical Engineering within the Faculty of Engineering Technology. He directs theSurgical Robotics Laboratory, and is affiliated with MIRA – Institute for Biomedical Technology and Technical Medicine. He is also affiliated with theDepartment of Biomedical Engineering, University of Groningen and University Medical Center Groningen. Sarthak obtained his doctoral degree in the Department of Mechanical Engineering at the Johns Hopkins University, Baltimore, USA. Prior to commencing his studies at Johns Hopkins, he worked for three years as a dynamics and controls analyst at MacDonald Dettwiler and Associates on the International Space Station Program. Sarthak received his Master of Engineering degree in Mechanical Engineering from McGill University, Montreal, Canada. He is the recipient of the European Research Council (ERC) Starting grant, Netherlands Organization for Scientific Research (NWO) VENI award, Link Foundation fellowship, McGill Major fellowship, and NASA Space Flight Awareness award. He is the co-chair of the IEEE Robotics and Automation Society Technical Committee on Surgical Robotics, and area co-chair of the IFAC Technical Committee on Biological and Medical Systems. Sarthak’s broad research interests are primarily in the area of applied mechanics at both macro and micro scales. He is interested in the modeling and control of electro-mechanical systems with applications to medical robotics.
Abstract
This talk will present an overview of technology research, development and innovation activities in robot-assisted laser microsurgery at IIT. Lasers are being increasingly used in operating rooms as precision surgical tools for delicate surgeries on both soft and hard tissue. Applications range from fetal surgery to orthopedics, with significant examples in ophthalmology and laryngology. However, current clinical technologies do not properly support the accurate and intuitive use of lasers for high-precision high-quality microsurgeries, imposing severe challenges to the operations. To improve on this, new surgical robotic technologies and capabilities are being developed at IIT. Robot assistance is particularly suited and desired for laser microsurgery applications. Recent results prove they can augment the sensing and actuation capabilities of microsurgeons, allowing significant improvements in terms of surgical site accessibility and visualization, laser controllability, safety and surgical quality. Nevertheless, translating robotics research results to clinical practice is a long and challenging process in itself, involving a continuous refinement process with many system redesigns and simplifications. This talk will conclude presenting the IIT experience in this last phase, which is bringing microsurgical robotic systems closer to clinical trials.
Biography
Leonardo S. Mattos is a Team Leader at the Istituto Italiano di Tecnologia (IIT) in Genoa. His research background includes robotic surgery, robot-assisted laser microsurgery, user interfaces, mixed and augmented reality, systems integration, automation, usability analysis, computer vision, micromanipulation, and mobile robots. Leonardo received his Ph.D. degree in electrical engineering from the North Carolina State University (NCSU, USA), where he worked as research assistant at the Center for Robotics and Intelligent Machines (CRIM) from 2002 until 2007. Leonardo has been a researcher at the IIT’s Department of Advanced Robotics since 2007. He is currently Head of the Biomedical Robotics Laboratory, leading a group of 12 researchers. Leonardo was the PI and coordinator of the EC funded project μRALP, a very successful project dedicated to the development of new tools and systems for robot-assisted laser microsurgery, which was rated with the highest grade of Excellent at its final review.
Abstract
A flexible needle has been recently introduced and improved for drug delivery and diagnosis. The flexible needle is made with a bevel tip so that it forms a bending curve as it is inserted into soft tissue. This enables to steer the needle by rotating and inserting. For the automatic control, the kinematic model and path planning for the needle insertion are developed. To capture and utilize the uncertainty in the needle insertion, a stochastic modeling technique is applied to a nonholonomic model for the flexible needle. The nonholonomic stochastic model is then used for the probability-based path planning. In this talk, a novel design idea and a new planning method for improved needle manipulation are also discussed.
Biography
Wooram Park is an assistant professor in the Department of Mechanical Engineering at University of Texas at Dallas. His research mainly concerns medical robots, computational structural biology and human kinetics. Prior to joining UT Dallas in 2011, he was a postdoctoral fellow in Mechanical Engineering at Johns Hopkins University. He received his PhD degree in Mechanical Engineering from Johns Hopkins University in 2008. He also received the B.S.E. and M.S.E. degrees in Mechanical Engineering from Seoul National University, Seoul, Korea, in 1999 and 2003, respectively. He received the IEEE Transactions on Automation Science and Engineering Best Paper Award in 2015. He was also a recipient of Creel Family Fellowship at Johns Hopkins University in 2007. He is a member of IEEE and ASME.
Medical robot and navigation system using intraoperative information system for minimally invasive surgery
Abstract
Endoscopic surgery is now very popular as a form of minimally invasive surgery in which surgeons perform the operation using forceps and an endoscope through trocar. However, while this surgery has lots of merits, there are disadvantages that the working flexibility and field of view are limited. To overcome this, we have developed information based robotic system. Intra-operative sensing information offers the right target position during surgery and also surgeon can confirm the reliability of the treatment. Then the robot can be controlled based on the accurate prediction of the biological response against the operation.
In this talk, we will present the our recently developed robotic system and navigation system using intraoperative sensing information including vascular information based on ultrasound image and image mapping system for fetus surgery and force measurement system.
Biography
Prof. Etsuko Kobayashi is currently an associate professor of department of precision engineering, school of engineering, the University of Tokyo. She received the B.S., M.S., and Ph.D. degree in precision machinery engineering from the University of Tokyo, Tokyo, Japan in 1995, 1997 and 2000, respectively. Her research interests include medical robotics, surgical navigation system and biomedical instrumentation. She has won 3rd prize of German Innovation Award and Young Investigator Award of Japan Society of Computer Aided Surgery in 2009. Now she is in charge of several research grants from Japan in Medical robotics and Computer Aided Surgery
Kevin Cleary, Children’s National Medical Center, USA
MRI Compatible Robotics for Pediatrics
Abstract
MRI compatible robotics as an area of increasing interest within the medical robotics community. In this talk I will review some of the work done to date and then present our work with MRI compatible robotics for pediatrics. Two clinical applications will be presented: shoulder arthrography and long bone biopsy.
Biography
Kevin Cleary PhD is the Technical Director of the Bioengineering Initiative in the Sheikh Zayed Institute for Pediatric Surgical Innovation at Children’s National Health System in Washington DC. He is internationally known for his work in medical robotics and image-guided interventions. He currently leads a team of researchers developing biomedical devices for minimally invasive pediatric procedures.
Hongliang Ren, National University of Singaore, Singapore
Recent Progresses in Flexible Surgical Robotics and Navigation
Abstract
Minimally invasive Robotic Surgery (MIRS) is emerging as a new paradigm for a wide range of surgical and interventional procedures. Common benefits of MIRS include shorter hospital stay, reduced trauma, better cosmesis, etc. Robotic devices used in MIRS are transforming from traditional rigid manipulators to flexible manipulators, which enable surgeons a wider range of operations with less trauma. Intelligence, flexibility and compliance are important features for flexible robotic systems in minimally invasive surgeries. We will discuss recent progresses while investigating tele-operated intelligent flexible surgical robotic systems. Various operation modes and intelligent navigation approaches will be discussed to cater for different clinical needs including semi-automatic teleoperation mode and full automatic image guidance. This talk will give a brief introduction to these ongoing research topics of intelligent and compliant robotics in surgical applications.
Biography
Dr. Hongliang Ren is currently an assistant professor and leading a research group on medical mechatronics in the Biomedical Engineering Department of National University of Singapore (NUS). He is an affiliated Principal Investigator for the Singapore Institute of Neurotechnology (SINAPSE) and Advanced Robotics Center at National University of Singapore. Dr. Ren received his PhD in Electronic Engineering (Specialized in Biomedical Engineering) from The Chinese University of Hong Kong (CUHK) in 2008. After his graduation, he worked as a Research Fellow in the Laboratory for Computational Sensing and Robotics (LCSR) and the Engineering Center for Computer-Integrated Surgical Systems and Technology (ERC-CISST), Department of Biomedical Engineering and Department of Computer Science, The Johns Hopkins University, Baltimore, MD, USA, from 2008 to 2010. In 2010, he joined the Pediatric Cardiac Biorobotics Lab, Department of Cardiovascular Surgery, Children’s Hospital Boston & Harvard Medical School, USA, for investigating the beating heart robotic surgery system. Prior to joining NUS, he also worked in 2012 on a collaborative computer integrated surgery project, at the Surgical Innovation Institute of Children’s National Medical Center, USA. His main areas of interest include Biomedical Mechatronics, Computer-Integrated Surgery, and Dynamic Positioning in Medicine.
Invited by Professor Wooram Park, Dr. Ren gave a seminar at UT Dallas, with the topic of “Surgical Robotics and Navigation with Intelligence, Flexibility and Compliance”.




























![wpark_large[1]](http://bioeng.nus.edu.sg/mm/wp-content/uploads/2015/06/wpark_large1.jpg)