



Author: admin
Dr Ren delivered IEEE ICIA plenary talk
Dr Ren delivered A plenary talk at IEEE ICIA 2017 and also presented other two research publications.

Co-organization of ICAR 2017 on the boats
Our team co-organized the historical ICAR (International conference on advanced robotics) conference at Hong Kong. Dr Ren served as the program chair and our previous and current members were presenting in the conference. 



Our paper to ICVS2017 shortlisted
Our paper on the stereo endoscope navigation was shortlisted as Best conference paper (finalist award) in the recent ICVS 2017 conference at Shenzhen.
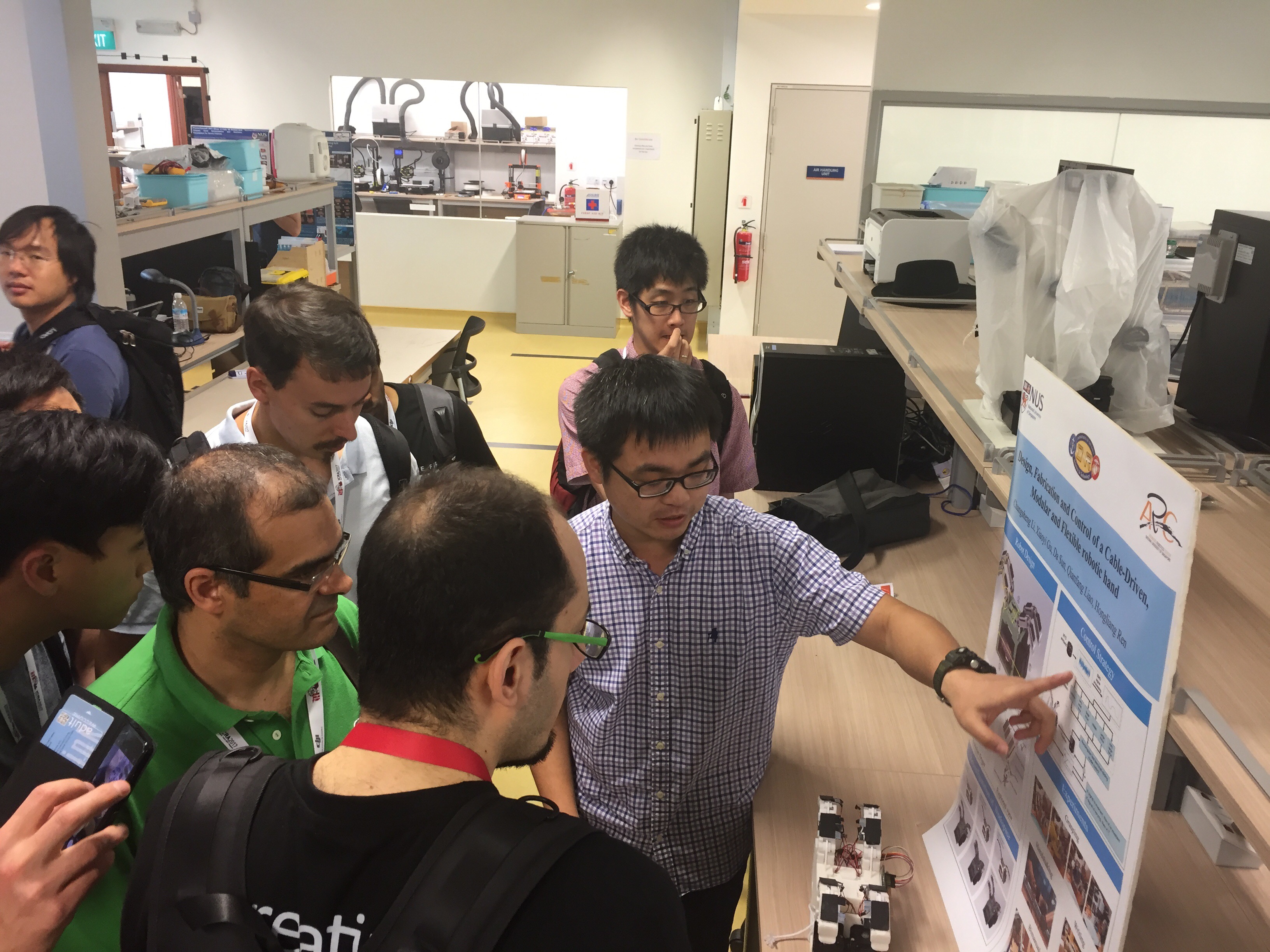
Team showing at Innofest
Team showing flexible robotic manipulators at NUSRI Innofest

Dr REN invited to talk at SUDA
Dr REN was invited to talk about recent surgical robotics Research at SUDA, Soochow University

Team at ICRA
Our team members have been actively participating in the ICRA conference at various angles including chairing sessions, volunteers, technical tour Demo, workshops, robotic challenge among others.




BN2204 FUNDAMENTALS OF BIOMECHANICS
BN2204 FUNDAMENTALS OF BIOMECHANICS
2016/2017, Semester 2 Engineering (Biomedical Engineering)
Modular Credits: 4 Class Size: 95
Learning Outcomes
The module aims to introduce students to the applications of engineering statics and dynamics to perform simple force analysis of the musculoskeletal system; give an appreciation of kinematics and kinetics of human motions; apply the fundamentals of mechanics, i.e. stress and strain in biological systems, shear force, bending moment and torsion.
At the end of this course, students should be able to:
- Draw free body diagrams and identify unknown reaction forces and moments
- Solve statically determinate problems involving rigid bodies, pin-jointed structures
- Understand the concepts of engineering stress, strain and materials behaviour
- Determine the load distributions and corresponding stresses and strains in structures under tension, shear, compression, torsion and bending
- Design structures to prevent failure including buckling
- Describe the anatomical structures of the major joints and spine of a human body and relate to body movement and functions
- Analyze the kinematics & kinetics of human movement
- Explain the time dependent behavior of human movement
Prerequisites
PC1431 Physics IE
Teaching Modes
Module will consists of Lectures, Tutorials, Labs and Continual Assessment (CA) where:
• CA will comprise term papers/quizzes (20%) and lab assignments (30%).
• As such, total CA will constitute 50% of the total marks. The rest of 50% will come from the final examination.
|
Lecture |
Tutorial |
Lab |
Lecturer |
|
|
Wk 1: 9 Jan |
Wk 1: – |
Wk 1: – |
Prof. Lim Chwee Teck |
|
|
Wk 6: 13,16 Feb |
Wk 6:- |
Wk 6:- |
A/Prof. Toh Siew Lok |
|
|
18 – 26 Feb RECESS WEEK |
||||
|
Wk 7: 27 Feb |
Wk 7: 2 Mar |
Wk 7:- |
||
|
Wk 9: 13 Mar |
Wk 9: 16 Mar (Quiz) |
Wk 9:-15, 17 Mar |
Asst Prof. Ren Hongliang |
|
|
Wk 17 Apr |
Reading Week |
|||
|
Wk 15: 22 Apr onwards |
Examination |
|||
|
Module |
Lab Group |
Lab Time |
Exp 1 |
Exp 2 |
|
BN2204 |
U01 |
Wed 2 – 5 |
25-Jan |
29-Mar |
|
BN2204 |
U02 |
Wed 2 – 5 |
1-Feb |
22-Mar |
|
BN2204 |
U03 |
Wed 2 – 5 |
8-Feb |
15-Mar |
|
BN2204 |
U04 |
Wed 2 – 5 |
15-Feb |
8-Mar |
|
BN2204 |
U05 |
Fri 9 – 12 |
20-Jan |
17-Mar |
|
BN2204 |
U06 |
Fri 9 – 12 |
3-Feb |
24-Mar |
|
BN2204 |
U07 |
Fri 9 – 12 |
10-Feb |
10-Mar |
|
BN2204 |
U08 |
Fri 9 – 12 |
17-Feb |
31-Mar |
Syllabus
Prof Lim C.T.
- Introduction to Biomechanics
- Statics applied to Biomechanics
- Characteristics of Forces; Static Equilibrium of Rigid Bodies
- Introduction to Mechanics of Deformable Body
- Concept of Stress and Strain
- Basic mechanical loads
- Behaviour of elastic and viscoelastic materials
Prof Toh S.L.
- Indeterminate systems (Axial & Torsion)
- Combined stresses
- Failure Theories
- Fatigue & Endurance
Prof Ren H.L.
- Biomechanical analysis of human motion
- Body and joint movement
- Kinematics – Linear and Angular
- Kinetic – Linear and Angular
- Gait analysis
- Inverse dynamics and link-segment modelling
EG1109/EG1109M Statics and Mechanics of Materials
2-1-0.5-3-3.5
Workload Components : A-B-C-D-E
A: no. of lecture hours per week
B: no. of tutorial hours per week
C: no. of lab hours per week
D: no. of hours for projects, assignments, fieldwork etc per week
E: no. of hours for preparatory work by a student per week
Force/Torque Sensor for Tele-operated Catheterization Procedures
Abstract
A tele-operated robotic catheterization system can significantly alleviate the surgeons from radiation exposure and fatigue resulted from long standing time with protective suits. Proximal force/torque signals imply the critical information about the contact forces between the catheter and its surrounding structures. This paper presents a compact, cost-effective force and torque sensing device suitable for catheterization procedures to measure the proximal force/torque signals of the input catheter. The device consists of a rotatable and linear retractable mechanism, a laser mouse sensor, and a coil spring. As the stretched, compressed, and twisted values vary due to the sliding joint, the force and torque signals can be computed based on the Hooke’s law. The proposed sensing device has many advantages such as cost-effective, easily miniaturized and customized, and can be extended to the MRI compatible sensors. The experimental results with step response and time-varying loads by comparing to an ATI Nano17 force/torque sensor show that the Root Mean Squared Error (RMSE) for force and torque measurement are 0.042 N and 0.228 mNm respectively.

Video PPT demo
Publications
J. Guo; M. Li; P. Ho & H. Ren Design and Performance Evaluation of a Force/Torque Sensor for Tele-operated Catheterization Procedures IEEE Sensors Journal, 2016, PP, 1-8
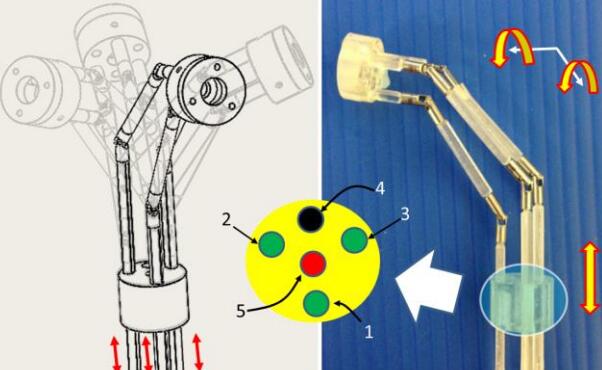
Surgical Manipulator based on Parallel Mechanism
Abstract
We presents a 5-DOF manipulator which consists of three parts, 1-DOF translational joint, a bendable skeleton (2-DOF for Omni-directional bending motion), and a rotatable forceps gripper (1-DOF for rotation, 1-DOF for opening/closing). The bendable segment in the manipulator achieves two orthogonal bending DOFs by pulling or pushing three parallel universal-joint-based shaft chains. Forward and inverse kinematics of the bendable skeleton is analyzed. The workspace calculation illustrates that the structure of the three parallel shaft chains can reach a bending angle of 90 degree in arbitrarily direction. The reachability of the manipulator is simulated in Adams. According to the surgical requirements, the manipulator is actuated to draw circle during the tests while the end effector is kept bending at 60 degree. The results show that the end effector can precisely track the planning trajectory (precision within 1 mm).
Video demo
Publications
Q. Liu; J. CHEN; S. Shen; B. Zhang; M. G. Fujie; C. M. Lim & H. REN Design, Kinematics, Simulation of Omni-directional Bending Reachability for a Parallel Structure Forceps Manipulator BioRob2016, 6th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, June 26-29, 2016, Singapore, 201