Our Team projects Skullbot won the best structure award for 2019 Global Innovation Design Competition of Medical Robotics together with 50000RMB project fund.





Our Team projects Skullbot won the best structure award for 2019 Global Innovation Design Competition of Medical Robotics together with 50000RMB project fund.
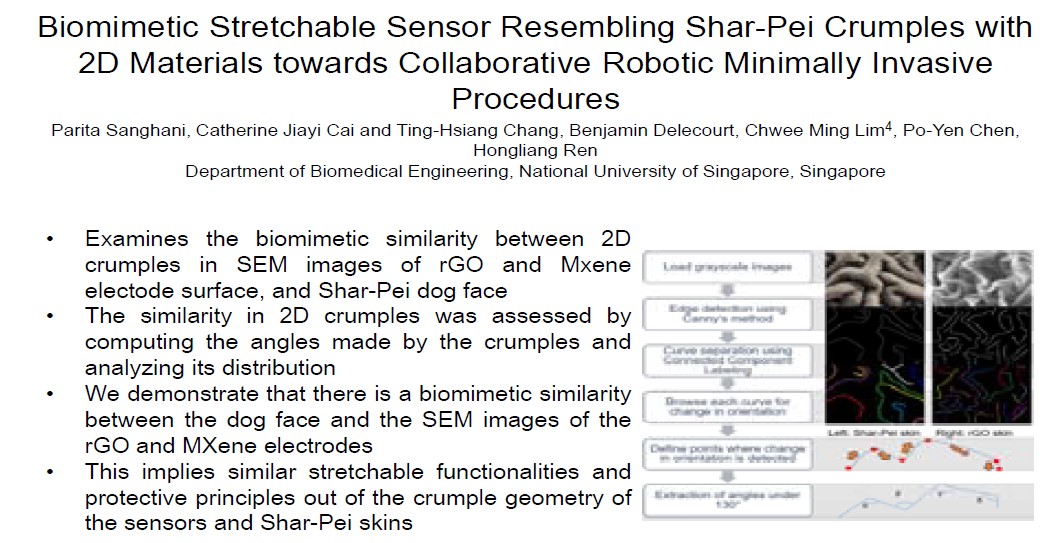
Our paper entitled “Biomimetic Stretchable Sensor Resembling Shar-Pei Crumples with 2D Materials towards Collaborative Robotic Minimally Invasive Procedures” (by Parita Sanghani, Catherine Jiayi Cai, Ting-Hsiang Chang, Benjamin Delecourt, Chwee Ming Lim, Po-Yen Chen, Hongliang Ren) was awarded for the Best Paper in Biomimetics at The IEEE Robio 2019 (The 2019 IEEE International Conference on Robotics and Biomimetics, Dali, Yunnan, 6-8 December 2019). IEEE ROBIO 2019 conference committee accepted 403 papers from over 739 paper submissions for oral presentations at the conference.

Dr. Ren delivered a plenary talk at ROBIO’19, the 2019 International Conference on Robotics and Biomimetics, on the topic of “Proprioceptive Transluminal Robotics in Connection with Monkey King”.

A seminar on Medical Robot Systems for Laparoscopic, Endoscopic, Microscopic Surgeries was given by Prof. Dong-Soo Kwon from the Korea Institute of Science and Technology (KAIST).

Dr. Ren delivered a plenary talk at BDML’19, the 2019 International Conference on Big Data and Machine Learning, on the topic of Representation Learning in Multimodal Spatiotemporal Image-Guided Procedures, at Chengdu, China.
Dr. Ren was invited to talk at IEEE IROS Workshop on Intelligent Robot Interaction with the Anatomy at Macau.

Dr. Ren delivered a keynote talk at ICSRIH’19, the 2019 International Conference on Surgical Robots and Intelligent Healthcare (ICMSR 2019), on the topic of Medical sensing and stretchable continuum, at Shanghai, China (Hosted by Shanghai Institute of Healthcare and Medical Science).

Our teamwork on surgical instrument tracking (led by Mobarakol) was selected for oral presentation at MICCAI 2019, Shenzhen. Another paper on Robot-Assisted Surgery Using Multi-Domain CNN led by Qiu Liang was also selected for a workshop presentation and HTL journal publication.
Key facts about MICCAI 2019:
Related publications:
Islam, Mobarakol, Yueyuan Li, and Hongliang Ren. “Learning Where to Look While Tracking Instruments in Robot-assisted Surgery.” International Conference on Medical Image Computing and Computer-Assisted Intervention. Springer, Cham, 2019.
Qiu, Liang, Changsheng Li, Hongliang Ren. “Real-time Surgical Instrument Tracking in Robot-Assisted Surgery Using Multi-Domain CNN.” Healthcare Technology Letters (2019).

Our team project, Skullbot, lead by Xiao, Kirthika, Catherine and Drs Nic & Ren, won the TAP (technology acceleration program) award with 200,000, for the further project development in medical applications.

Our research prototypes on medical robotics were presented during Innovfest Suzhou 2019 (http://www.innovfestchina.com/), which is a leading international Innovation and Entrepreneurship Festival in China.