Our team members presented research publications and one of them won best paper finalist during IEEE ROBIO 2018 (International Conference on Robotics and Biomimetics).
OrumBot: Origami-based Deformable Robot Inspired By An Umbrella Structure, best paper finalist.
Hritwick Banerjee, Sakshi Kakde, Hongliang Ren
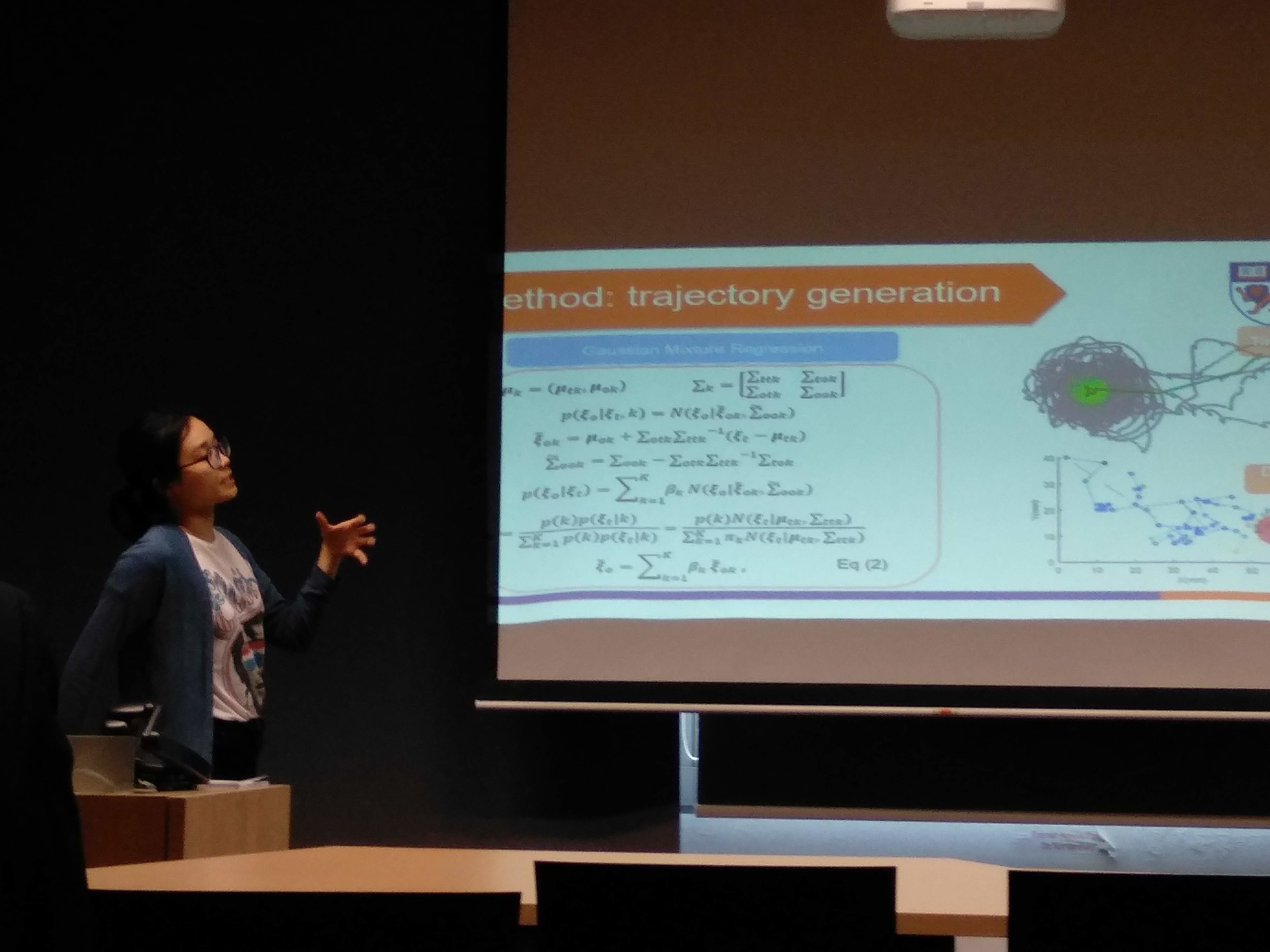
Finger Movement Classification from Myoelectric Signals Using Convolutional Neural Networks
Venkatesh Bharadwaj S, Mobarakol Islam, Wei Zhang, Hongliang Ren
Preliminary Design and Performance Test of Tendon-Driven Origami-Inspired Soft PeristalticRobot
HRITWICK BANERJEE, Neha Pusalkar, Hongliang Ren