


Abstract
The micro actuator has been studied for its application in micro operations such as manipulating cellular aggregate, the tissues or drug delivery. The traditional actuation methods include thermo-mechanical actuation, electromagnetic actuation, electrostatic actuation and pneumatic actuation. Among these actuation methods, pneumatic actuation has the advantage of not generating heat and current during actuation.
We investigate
1) a streamlined and standardized fabrication procedure to make sub-millimeter scale soft pneumatic actuators (SPA) with customizable bending modalities achieved by shape engineering. Preliminary models are also given to interpret width-based shape engineering for customization and to compare the bending angle and radius of curvature measured from the characterization experiments.
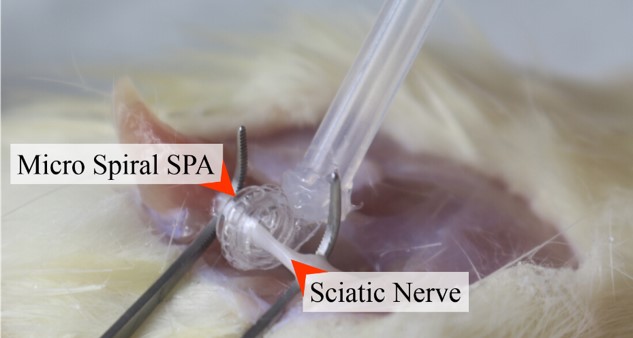
2) a new micro pneumatic actuator consisting of two biocompatible materials is designed, fabricated and tested. The actuator has one bending degree of freedom and the largest bending deformation is about 115°.
Publications
- X. Liang; Y. Sun & H. Ren A Flexible Fabrication Approach towards the Shape Engineering of Microscale Soft Pneumatic Actuators IEEE Robotics and Automation Letters, 2016, 1-6
- X. Liang; C. Lee & H. Ren Towards a Micro Pneumatic Actuator with Large Bending Deformation for Medical Interventions 7th WACBE World Congress on Bioengineering, 6th to 8th July, 2015, Singapore, Springer International Publishing, 2015, 52, 76-79
- P. M. Khin; J. H. Low; S. Kukreja; H. Ren & R. Yeow Soft Haptics Using Soft Actuator and Soft Sensor BioRob2016, 6th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, June 26-29, 2016, Singapore, 2016