IEEE ACCESS. PREPRINT VERSION. ACCEPTED Dec, 2017
Simultaneous Robot-World, Sensor-Tip, and Kinematics Calibration of an Underactuated Robotic Hand with Soft Fingers
Ning Tan, Xiaoyi Gu, and Hongliang Ren Senior Member, IEEE
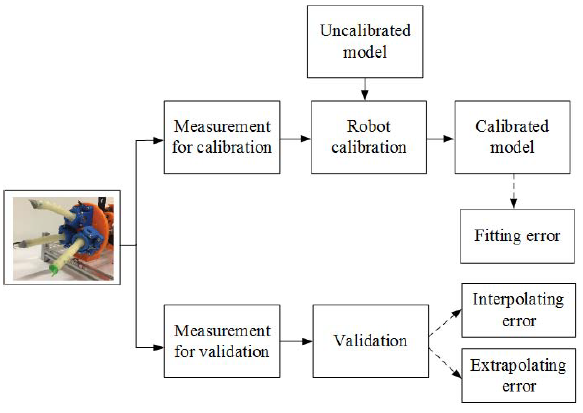
Abstract—Soft robotics is a research field growing rapidly with primary focuses on the prototype design, development of soft robots and their applications. Due to their highly deformable features, it is difficult to model and control such robots in a very precise compared with conventional rigid structured robots. Hence, the calibration and parameter identification problems of an underactuated robotic hand with soft fingers are important, but have not been investigated intensively. In this paper, we present a comparative study on the calibration of a soft robotic hand. The calibration problem is framed as an AX=YB problem with the partially known matrix A. The identifiability of the parameters is analyzed, and calibration methods based on nonlinear optimization (i.e., L-M method and interior-point method) and evolutionary computation (i.e., differential evolution) are presented. Extensive simulation tests are performed to examine the parameter identification using the three methods in a comparative way. The experiments are conducted on the real soft robotic-hand setup. The fitting, interpolating, and extrapolating errors are presented as well.
Index Terms—Soft robotics, calibration and identification, robotic hand, AX=YB, hand-eye calibration, tendon-driven robot