


Project Goals
A constrained tendon-driven serpentine manipulator is developed in our previous work, high level intelligence is expected to make manipulator system working autonomously. Considering the limited and confined working space of surgical operation, this project is aim to develop novel motion planning techniques for our surgical tendon-driven serpentine manipulator, which is expected to assist surgeon operation more accurate and convenience.
Approaches
In the clinical environment, chances are high that the manipulator may bump into neighboring tissue and organs and cause additional damages. For medical manipulator working within human body, optimal and accurate trajectory planning is the key enabler of surgical security because of any additional damage to proper functioning organs is intolerable. Moreover, the surgery usually has many additional disturbances including breathe, physical hand tremor and tiny displacement of the organs. These uncertainties require the planning algorithm to have good robustness to avoid damaging the proper functioning organs. As the most important factor that can lower the risk of additional damages, less sweeping area of manipulator motion results in more disturbances tolerance capability. Especially when energy cost of different planned trajectories are in the same level, the less sweeping area of whole manipulator body becomes more attractive for physician and reduce unpredictable risks in transoral procedure applications. Therefore, we propose a three dimensional neural dynamic planning algorithm which introduces sweeping area as a very important factor in neural stimulation propagation.
The three dimensional neural network is show in Figure 1, each neuron is connected with its adjacent 26 neurons. In our minimum planning model, the start state with highest activity propagates stimulation to whole network through connective weight. On the other hand, the configuration parameters representing obstacle collision hold the lowest value and do not connect with neighboring neurons. As a result, the neural stimulation spread as water ran down from a height place in planning neural dynamic field building, which is shown in Figure 2. Simultaneously, the robot starts from target state and looks for the highest state as climbing mountain. When robot reach the start state configuration parameter, the planning is finished. Then, the final motion sequence will be obtained by reversing the planned trajectory, which is from start state to target state.
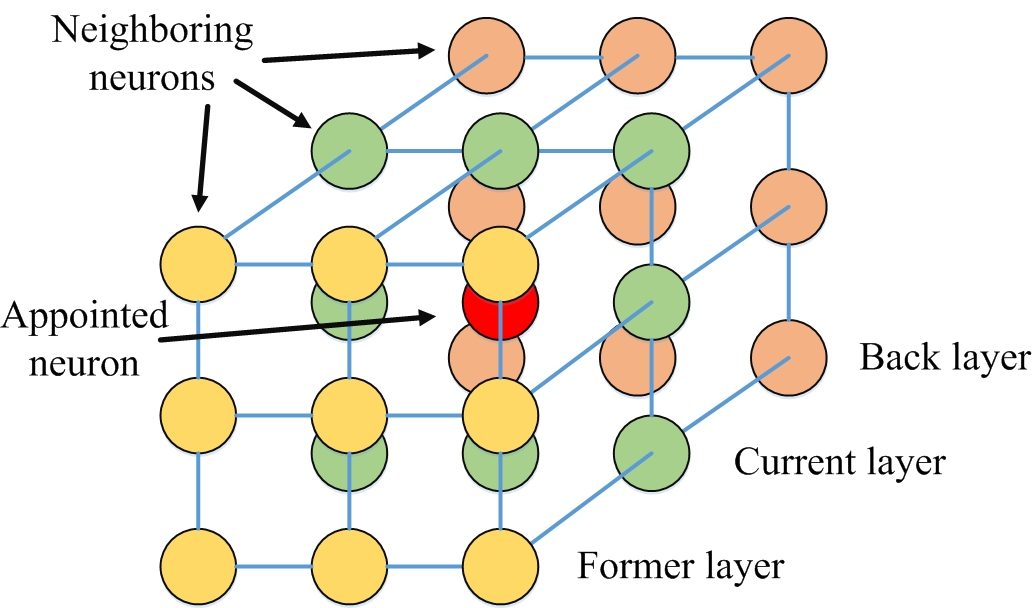
Fig.1 Three dimensional neural dynamic model

Fig.2 Neural dynamic field, which stimulation spread from start state to whole map.
Results
At first, we test our planning algorithm in representative simulation scenarios and compare with other famous planning algorithms, such as traditional neural dynamic planning algorithm, RRT and RRT*.
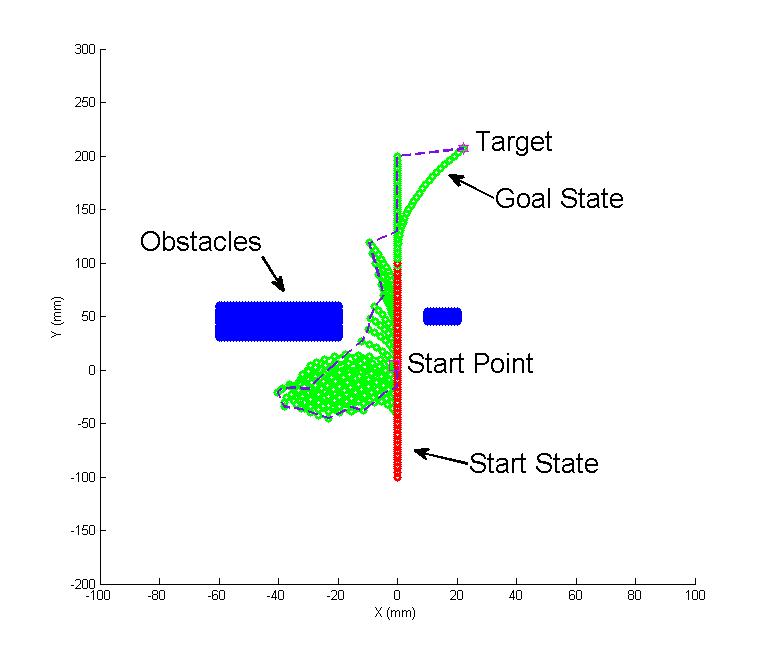
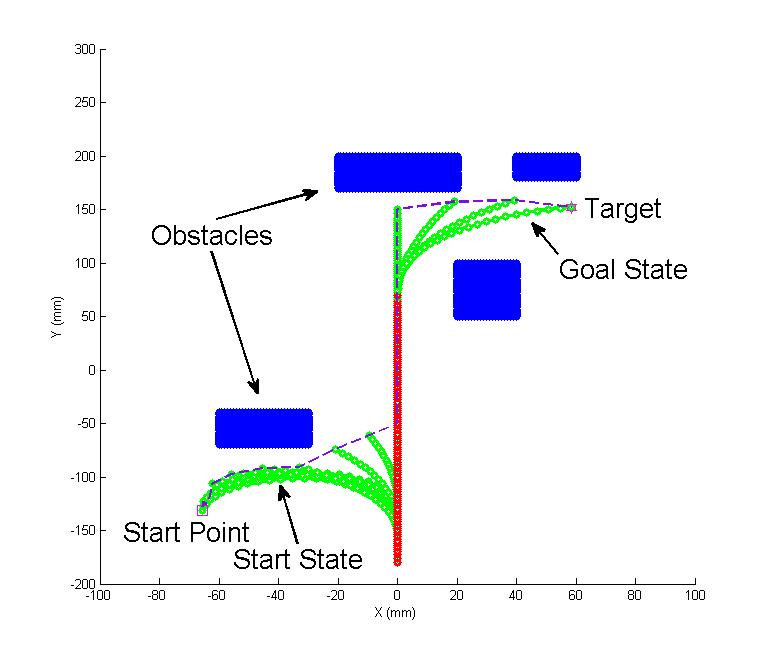
(a) Minimum sweeping area planning algorithm
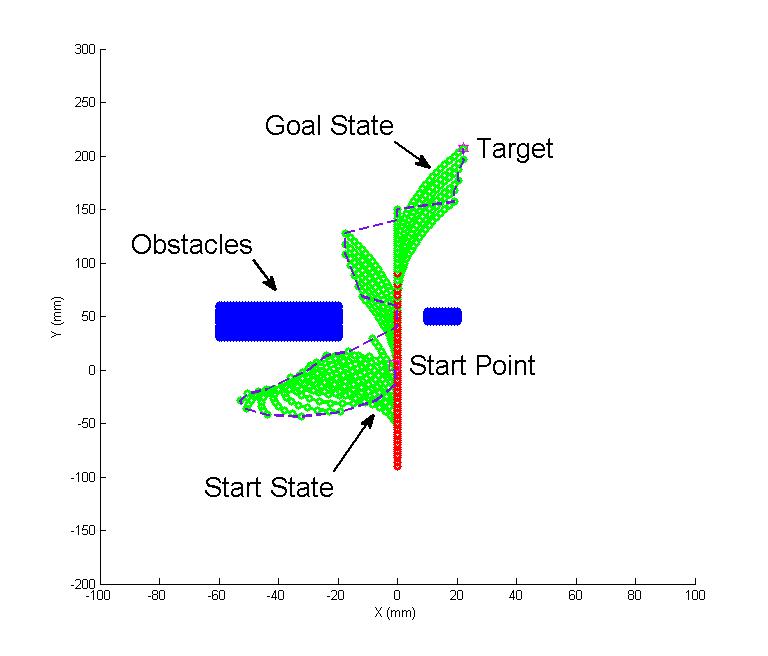
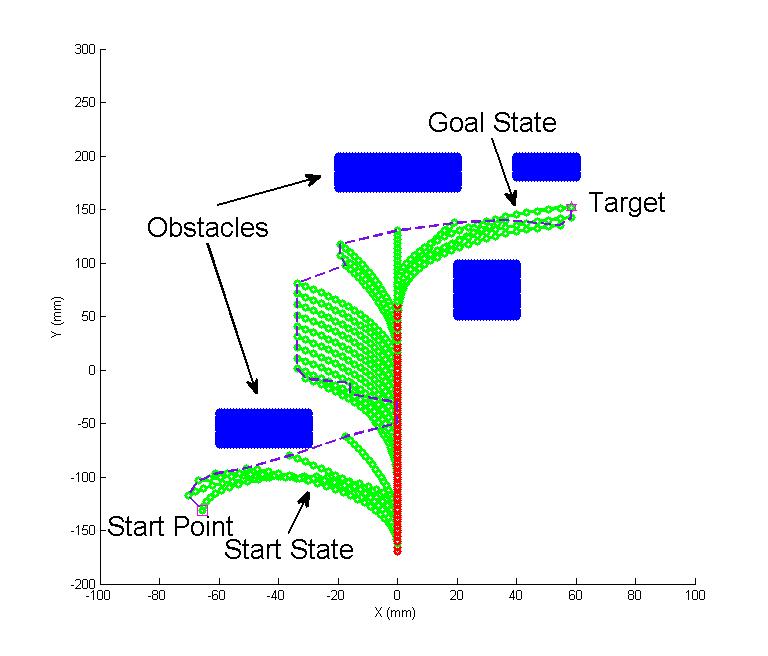
(b) Neural dynamic algorithm
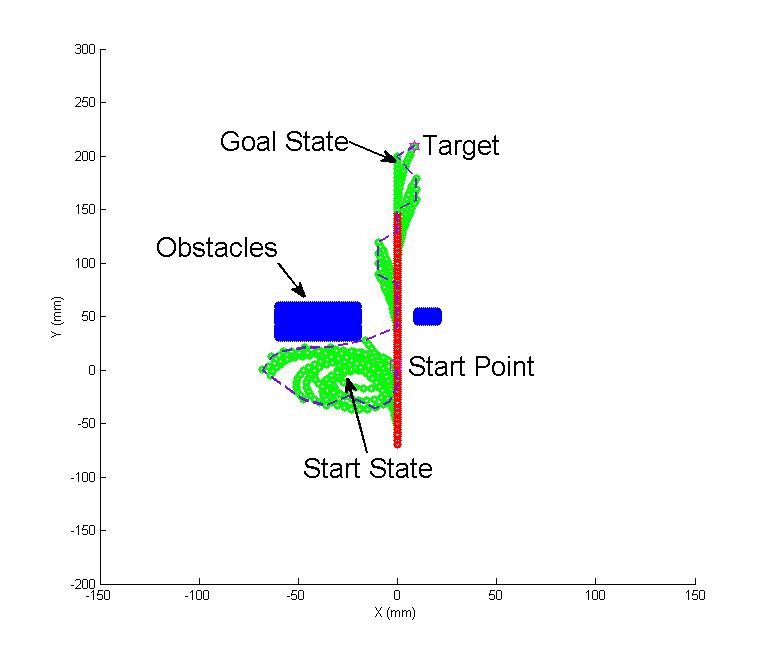
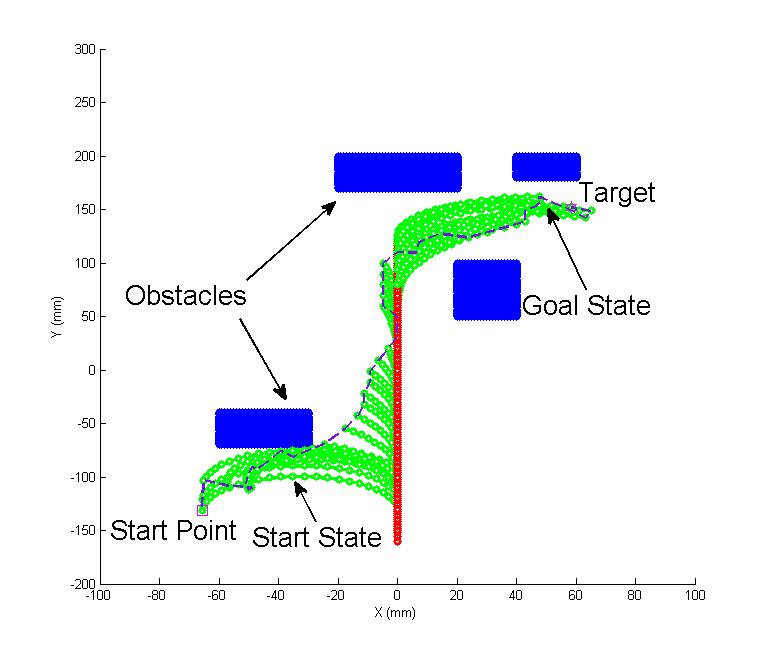
(c) RRT*
Fig.3 Simple case: a comparison simulation on a simple scenario consisting of two obstacles in the middle of the map is used for first test. The tendon-driven serpentine manipulator is left bended at the beginning and expected to reach the upper right target point. The manipulator is presented by green color (free bending segments) and red color (constrained bending segments). The distal tip trajectory is presented by a dash line. The performance of different planning algorithms in terms of sweeping area and obstacle avoidance ability are shown. Particularly, the area of green parts can be seen as the sweeping area of manipulator approximately
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
(c) RRT*
Fig.4 Complex case: a comparison simulation on a complex scenario consisting of four obstacles are used for test. The
tendon-driven serpentine manipulator is left bended at the beginning and expected to reach the target point surrounded by three obstacles in the upper right area. The differences in sweeping area and obstacle avoidance ability are shown obviously among different algorithms guidance.
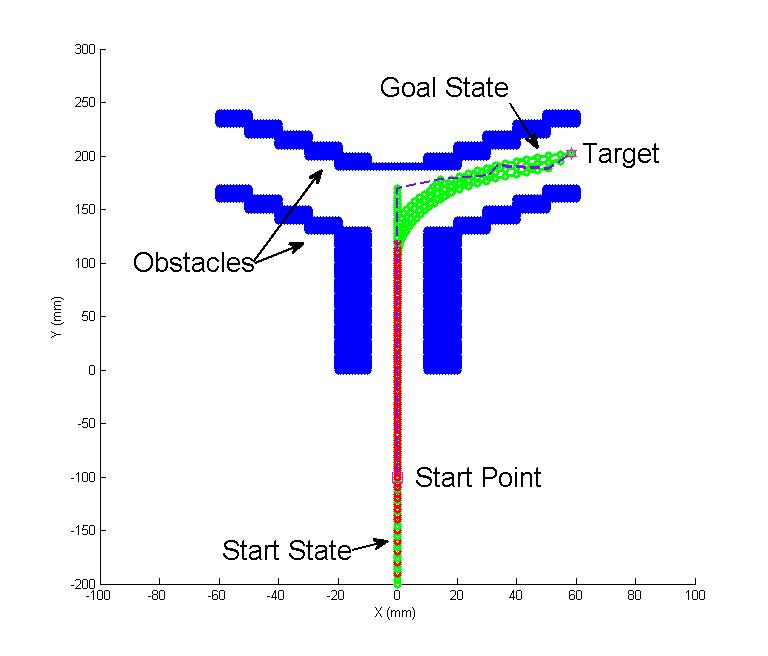
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
(c) RRT*
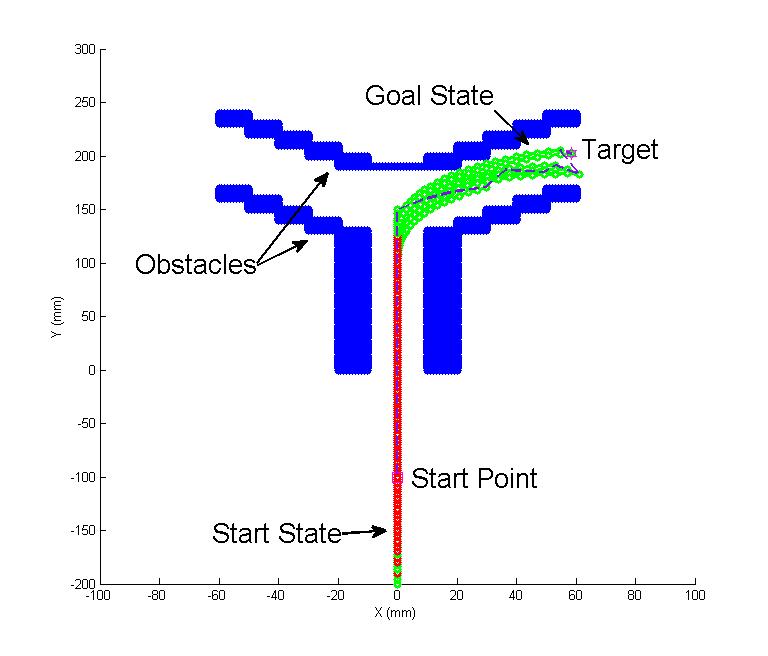
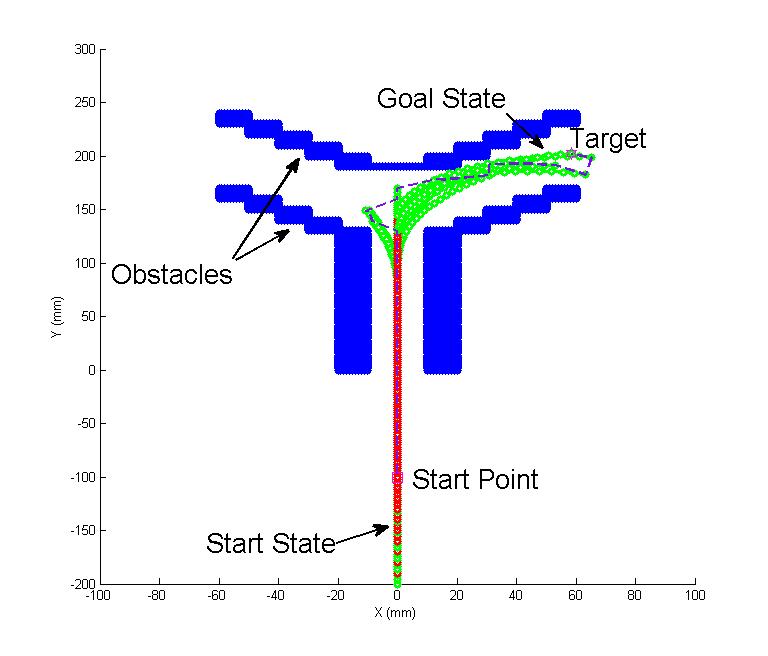
Fig.5 Tubular case 1: A virtual tubular clinical map in simulation is conducted in advance, where target is at the right side sub-branch. The tendon-driven serpentine manipulator is straight on the bottom of the tubular at the beginning.
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
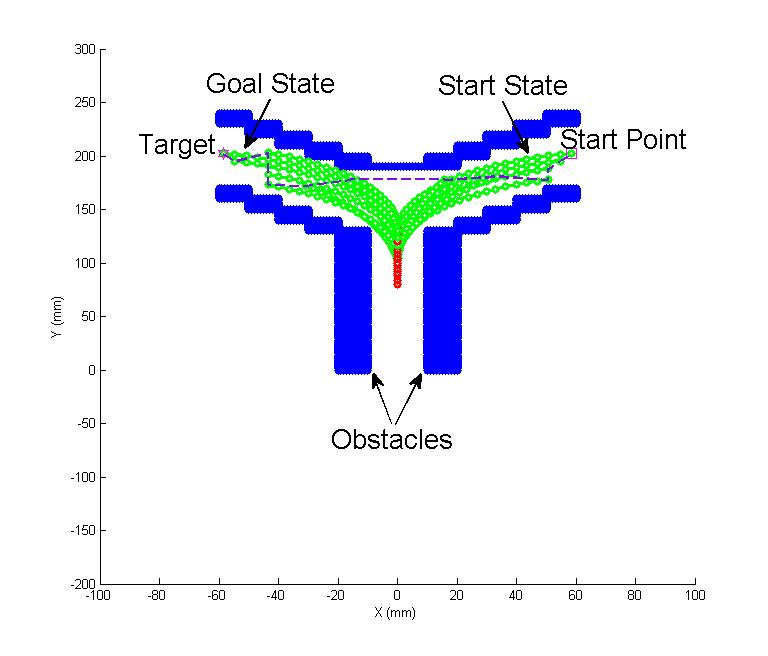
(c) RRT*
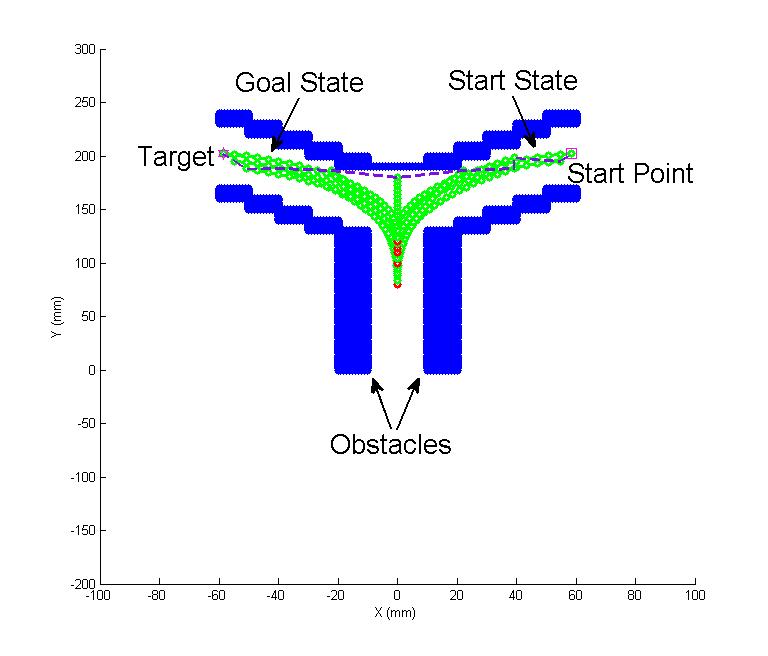
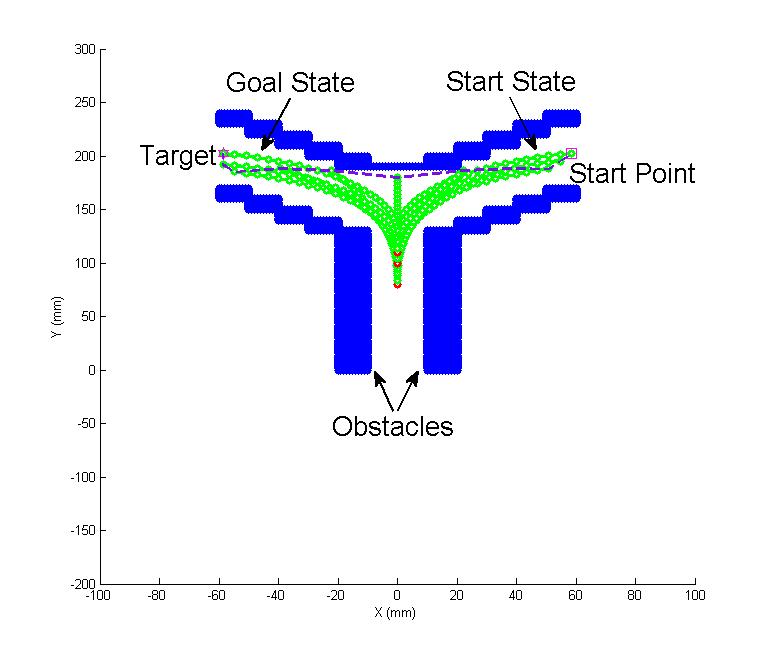
Fig.6 Tubular case 2: The same virtual tubular clinical map as Tubular case 1, but target is at the left side sub-branch and start point at the right side sub-branch. The tendon-driven serpentine manipulator is expected to move from right sub-branch to left one as manipulator moving in clinical operation.
Moreover, experiments are conducted in environments built by Lego blocks, where obstacle configurations are similar to simulation cases. In this experiment stage, the tendon-driven serpentine manipulator is expected to execute same motion sequences that are generated from complex case, tubular case 1 and tubular case 2 in simulation studies. The experimental results in phantom test are shown in video 2 (Phantom test on Lego bricks).
Finally, a preliminary transoral trials on cadaver human head is conducted to at Khoo Teck Puat Advanced Surgery Training Centre (ASTC), National University of Hospital, Singapore. The panorama of cadaver transoral experiments can be found in video 3. The operations on compute and corresponding softwares are shown in video 4. The experimental data are ploted by MATLAB, and four algorithms comparisons are shown in video 5.
People Involved
Visiting PhD Student: Yanjie Chen
PhD Student: Wenjun Xu
Project Investigators: Hongliang Ren
Publications
[1] Yanjie Chen, Zheng Li, Wenjun Xu, Hang Zhong, Yaonan Wang and Hongliang Ren, “Minimum Sweeping Area Motion Planning for Flexible Serpentine Surgical Manipulator with Kinematic Constraints”, IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2015), Accepted.
[2] Yanjie Chen, Wenjun Xu, Zheng Li, Shuang Song, Chwee Ming Lim, Yaonan Wang, and Hongliang Ren, “Safety-Enhanced Motion Planning with Minimum Sweeping Area for Flexible Surgical Manipulators using Neural Dynamics”, IEEE Transactions on Cybernetics, Submitted.
Videos
-Support powerpoint.
-Phantom test on Lego bricks.
-The panorama of cadaveric transoral experiments.
-The compute vision and corresponding software during clinical experiments.
-The surgical robot shape motion in experiments.