Guide wires are commonly used to assist surgeons during vascular surgery. Guide wires are usually the first to be placed, eventually allowing easy exchange of surgical tools to the target site. The surgeon has to manually control and manipulate the guide wire to the target region. This process is complicated by the tortuous nature of the vasculature and is made worse as the surgeon has limited vision (constant need to switch between overlay angiographs) and control over the guide wire tip (controlling the distal tip from the proximal end). For the first time towards minimally invasive Arteriovenous Fistula Angioplasty Procedures, we aim to improve the controllability of the in vivo guide wire via the attachment of a magnetic tip to the distal end of the guide wire, which under the control of external magnetic field generators can deflect the magnetic tip. This controlled deflection translates to the selection of entrance angle for the guide wire tip, affording distal control.
This is especially useful for navigating around stenosis which is common for patients with Arteriovenous(AV) Fistula. The repeated use of the fistula during dialysis has been claimed as a cause for the high occurrence of stenosis (due to tissue scaring from access). Fistulas and their grafts are however still preferred over other renal access in most situation due to its lower risk of infections. Our proposed system here can improve the controllability, safety and speed of current procedures and can enable AV-Fistula Angioplasty Procedures to be shifted to out-patient clinics.
Approaches/Results/Videos
People Involved
Student: Bok Seng Yeow
Research fellow: Jinji Sun
Project Investigators: Hongliang Ren, Jackie Ho
Related Publications
Yeow, B. S.; Sun, J.; Ho, J. & Ren, H. Towards Magnetically Actuated Guide-wire Steering in Arteriovenous Fistula Angioplasty Procedures IEEE Conference on Real-time Computing and Robotics (RCAR), IEEE, 2016, best student paper.
Ultrasound imaging procedures are deemed as one of the most convenient and least invasive medical diagnostic imaging modalities and have been widely utilized in health care providers, which are expecting semiautomatic or fully-automatic imaging systems to reduce the current clinical workloads. This paper presents a portable and wearable soft robotic system which has been designed with the purpose of replacing the manual operation to cooperatively steer the ultrasound probe. This human-compliant soft robotic system, which is equipped with four separated parallel soft pneumatic actuators and is able to achieve movements in three directions. Vacuum suction force is introduced to attach the robot onto the intended body location. The design and fabrication of this soft robotic system are illustrated. To our knowledge, this is the first body-attached soft robot for compliant ultrasound imaging. The feasibility of the system is demonstrated through proof-of-concept experiments.
Approaches/Results/Video
Developing a wearable soft robotic system (Figure 1), which is capable of mimicking the procedure of probe steering and optimizing the contact force and angle according to the specific conditions, has great significance of reducing the reliance of the ultrasound imaging on the experience of operators and obtaining images with high quality.
People Involved
PhD Student: Xiaoyi Gu
FYP Student: Koon Lin Tan
Project Investigator: Hongliang Ren
Related Publications
Ren, H.; Gu, X. ; Tan, K. L. Human-Compliant Body-Attached Soft Robots Towards Automatic Cooperative Ultrasound Imaging 2016 20th IEEE International Conference on Computer Supported Cooperative Work in Design (CSCWD 2016), IEEE, 2016, –
Flexible robotic manipulators have been widely used in minimally invasive surgery (MIS) and many other applications requiring closer inspection and operation. Although a variety of manipulators enabled by different mechanism have been developed, few of them can preserve softness, thinness and decent bending capability simultaneously. We develop miniature soft robotic manipulators made of hyper-elastic silicone rubber. Along with the manipulator design, novel fabrication methods are proposed and elaborated. Detailed characterizations are specified to show the bending capability of the manipulator given different air pressure. Specifically, our manipulator, as thin as 6 mm, is able to achieve 360° directional bending, and, when given pressure over 70kPa, it can reach 180° bending angle and around 5mm bending radius easily. Due to its innate compliance and small dimension, this type of robotic manipulator can deliver safe and comfortable interactions with the subjects. More significantly, the novel fabrications in this paper diversify the fabrication methods for soft pneumatic robots and actuators (SPRA) and further scale down their sizes. Continue reading
The overall objective of this project is to develop and evaluate the key technologies of Transnasal Artificial Tentacles, a new approach involving research on the tentacle-like robotic and sensing technologies. This is aiming to create a compliant, flexible, multiple-sensorized, immersive, intraoperative targeting and guidance system for constrained transnasal endoscopic surgeries in a confined workspace.
Minimally invasive surgery-based nasopharyngeal cancer treatment is promising, but currently, it is not a common treatment choice because of the absence of suitable tools. In this project, a multi-channel concentric tube robot is proposed for the treatment of nasopharyngeal cancer based on natural orifice translumenal endoscopic surgery. The proposed system has three channels, i.e. two manipulation channels and one vision channel, and all the three channels are confined by a 10 mm active sheath. The robot is controlled by human-in-the-loop bimanual teleoperation under active endoscopic guidance. The reduced sheath diameter and the steerable vision channel improve the functionality of the system and distinguish our design from the prior art. The feasibility of the system has been evaluated through a series of simulations and experiments. Results show that the proposed system is capable to conduct cooperative tasks in a confined space and the miniaturized manipulator is suitable for transnasal procedures. Besides, comparisons with other types of flexible surgical robots are discussed to further demonstrate the superiority of the proposed system in the target clinical applications.
Funding
Singapore Millennium Foundation
PI: Jan/11/2015 – Jan/10/2018
PUBLICATIONS
Yu H, Wu L, Wu K, Lim CM and Ren H (2016), “Development of a Multi-Channel Concentric Tube Robotic System With Active Vision for Transnasal Nasopharyngeal Carcinoma Procedures”, IEEE Robotics and Automation Letters., Jan, 2016. Vol. 1(2), pp. 1172-1178.
Nasopharynx cancer, or nasopharyngeal carcinoma (NPC), is a tumor that originates in the nasopharynx, the uppermost region of the pharynx where the nasal passage and the throat join. It is a common disease occurring to ethnic Chinese people living in or emigrating from southern China; it is also the eighth most frequently occurred cancer among Singaporean men. Traditional posterior nasopharyngeal biopsy using a flexible nasal endoscope has the risks of abrasion and injury to the nasal mucosa and thus causing trauma to the patient. Therefore, the goal of this project is to develop a compact continuum tubular robotic system to achieve collision free nasopharyngeal biopsy.
Fig.1 Illustration of the proposed CTR for nasopharyngeal biopsy.
Approaches
We developed a compact CTR which is 35 cm in total length, 10 cm in diameter, 2.15 kg in weight, and easy to be integrated with a robotic arm to perform more complicated operations.
Fig.2 The proposed continuum tubular robot
Fig.3 Compact and light weight CTR integrated with a positioning arm for
better conducting surgery
We also developed a 3D printed biopsy needle to equip our robot for transnasal biopsy procedure.
Fig.4 3D printed biopsy needle for transnasal biopsy
The workspace of the robot was analyzed to determine optimized tube parameters.
Fig.5 Workspace comparison for 3-DOF CTR with three initial configurations.
Top: all the outstretched part of the inner tube exposes; Middle: the outstretched part of the inner tube is partially covered by the outer tube; Bottom: the outstretched part of the inner tube is totally covered by the outer tube.
Further more, by using an electromagnetic tracking system, we are able to build a navigation system with shape reconstruction for the tubes.
Fig.6 Shape reconstruction using 3-order Bézier curve fitting
Fig.7 Sensing by EM tracker
Fig.8 Navigation interface
Results
Three groups of experiments were carried out. The first group is to tele-operate the robot to follow a linear path and a circular path. We found that the path following accuracy was about 2 mm.
Fig.9 Tele-operating the robot to follow a linear path and a circular path
Fig.10 Accuracy of the robot following the predefined paths
The second group is to validate the shape reconstruction algorithm. The accuracy of the results is about 1 mm.
Fig.11 Reconstruction setup
Fig.12 Reconstruction error
In the last group of experiments, the robot was tested in a biopsy procedure on a cadaver. The feasibility of the proposed robotic system was validated.
Fig.13 Cadaver experiment setup
Fig.14 Cadaver experiment process
People Involved
Research Fellow: Liao Wu
PhD Student: Keyu Wu
FYP Student: Li Ting Lynette Teo
Intern Student: Jan Feiling and Xin Liu
Project Investigator: Hongliang Ren
Publications
[1] Liao Wu, Shuang Song, Keyu Wu, Chwee Ming Lim, Hongliang Ren. Development of a compact continuum tubular robotic system for nasopharyngeal biopsy. Medical & Biological Engineering & Computing. 2016.
[2] Keyu Wu, Liao Wu, Hongliang Ren. Motion planning of continuum tubular robots based on features extracted from statistical atlas. In: Proceedings of 2015 IEEE International Conference on Intelligent Robots and Systems (IROS 2015).
[3] Keyu Wu, Liao Wu, Chwee Ming Lim, Hongliang Ren. Model-free image guidance for intelligent tubular robots with pre-clinical feasibility study: towards minimally invasive trans-orifice surgery. In: Proceedings of 2015 IEEE International Conference on Information and Automation (ICIA 2015). ( best paper finalist)
[4] Benedict Tan, Liao Wu, Hongliang Ren. Prototype development of a handheld tubular curvilinear robot for minimally invasive surgery. In: The 11th Asian Conference on Computer Aided Surgery (ACCAS 2015).
[5] Keyu Wu†, Liao Wu†, Hongliang Ren. An image based targeting method to guide a curvilinear concentric tube robot. In: Proceedings of 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014). Bali, Indonesia, 2014: 386-391 († equally contributed author).
A constrained tendon-driven serpentine manipulator is developed in our previous work, high level intelligence is expected to make manipulator system working autonomously. Considering the limited and confined working space of surgical operation, this project is aim to develop novel motion planning techniques for our surgical tendon-driven serpentine manipulator, which is expected to assist surgeon operation more accurate and convenience.
Approaches
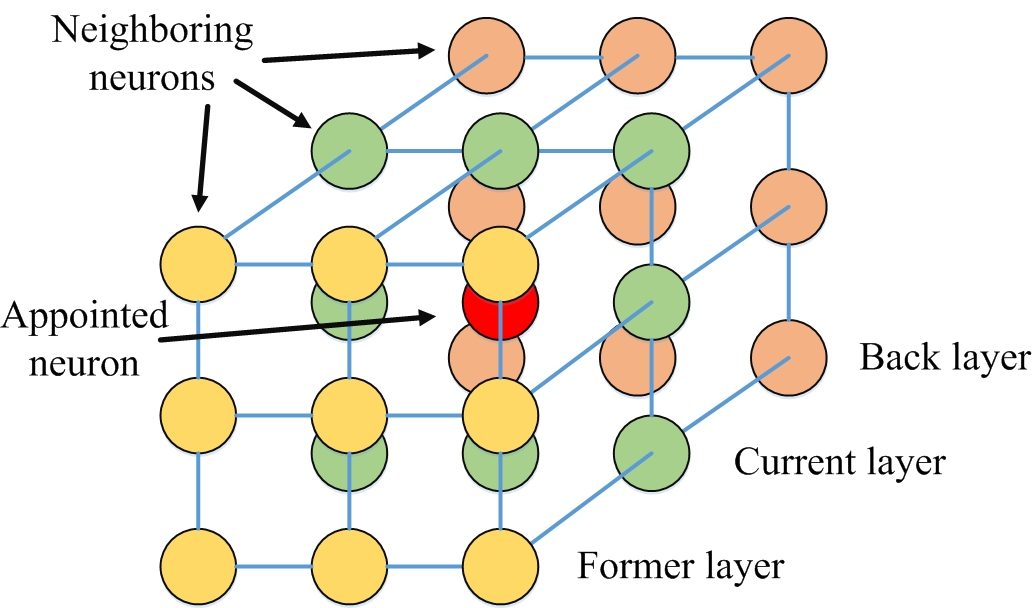
In the clinical environment, chances are high that the manipulator may bump into neighboring tissue and organs and cause additional damages. For medical manipulator working within human body, optimal and accurate trajectory planning is the key enabler of surgical security because of any additional damage to proper functioning organs is intolerable. Moreover, the surgery usually has many additional disturbances including breathe, physical hand tremor and tiny displacement of the organs. These uncertainties require the planning algorithm to have good robustness to avoid damaging the proper functioning organs. As the most important factor that can lower the risk of additional damages, less sweeping area of manipulator motion results in more disturbances tolerance capability. Especially when energy cost of different planned trajectories are in the same level, the less sweeping area of whole manipulator body becomes more attractive for physician and reduce unpredictable risks in transoral procedure applications. Therefore, we propose a three dimensional neural dynamic planning algorithm which introduces sweeping area as a very important factor in neural stimulation propagation.
The three dimensional neural network is show in Figure 1, each neuron is connected with its adjacent 26 neurons. In our minimum planning model, the start state with highest activity propagates stimulation to whole network through connective weight. On the other hand, the configuration parameters representing obstacle collision hold the lowest value and do not connect with neighboring neurons. As a result, the neural stimulation spread as water ran down from a height place in planning neural dynamic field building, which is shown in Figure 2. Simultaneously, the robot starts from target state and looks for the highest state as climbing mountain. When robot reach the start state configuration parameter, the planning is finished. Then, the final motion sequence will be obtained by reversing the planned trajectory, which is from start state to target state.
Fig.1 Three dimensional neural dynamic model
Fig.2 Neural dynamic field, which stimulation spread from start state to whole map.
Results
At first, we test our planning algorithm in representative simulation scenarios and compare with other famous planning algorithms, such as traditional neural dynamic planning algorithm, RRT and RRT*.
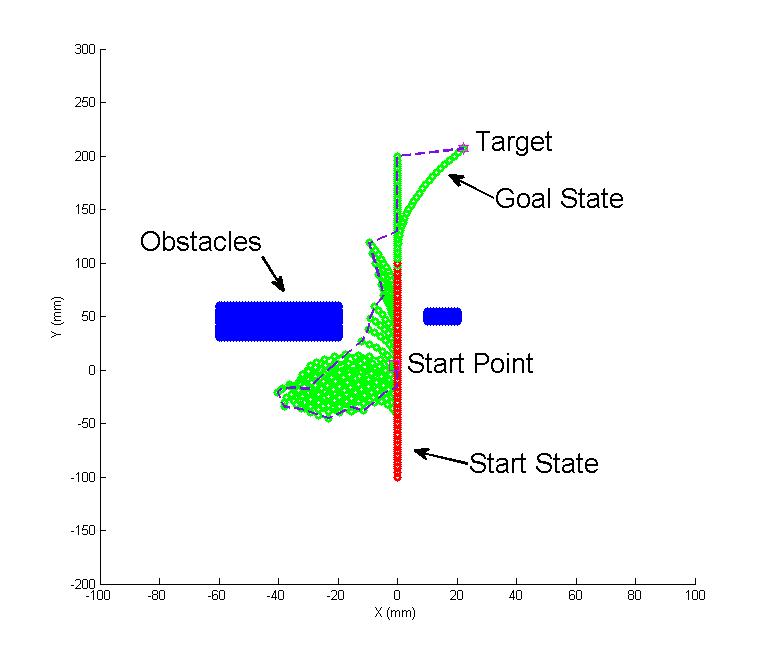
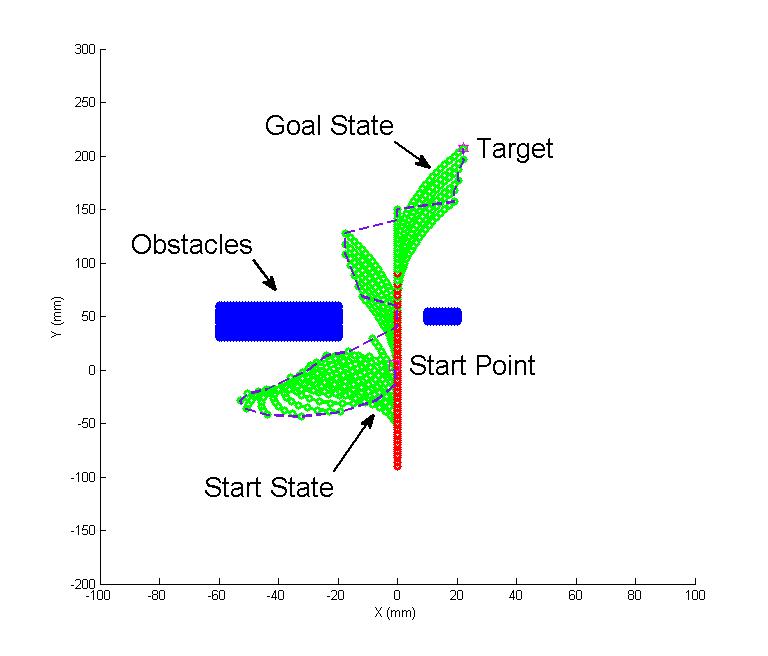
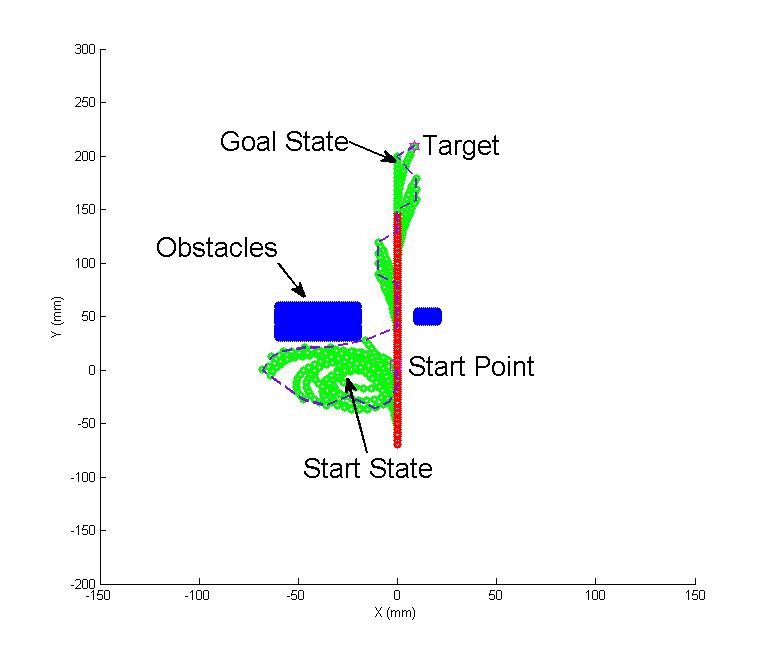
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
(c) RRT*
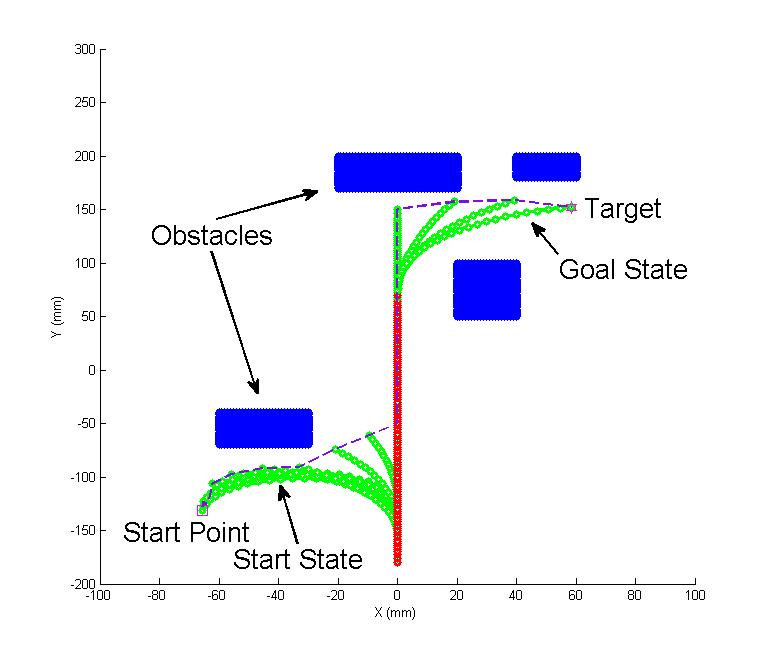
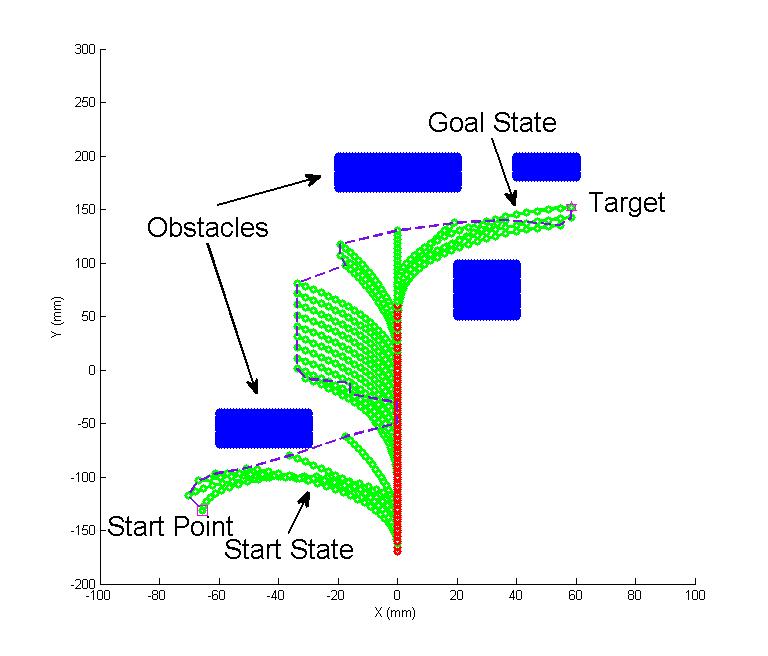
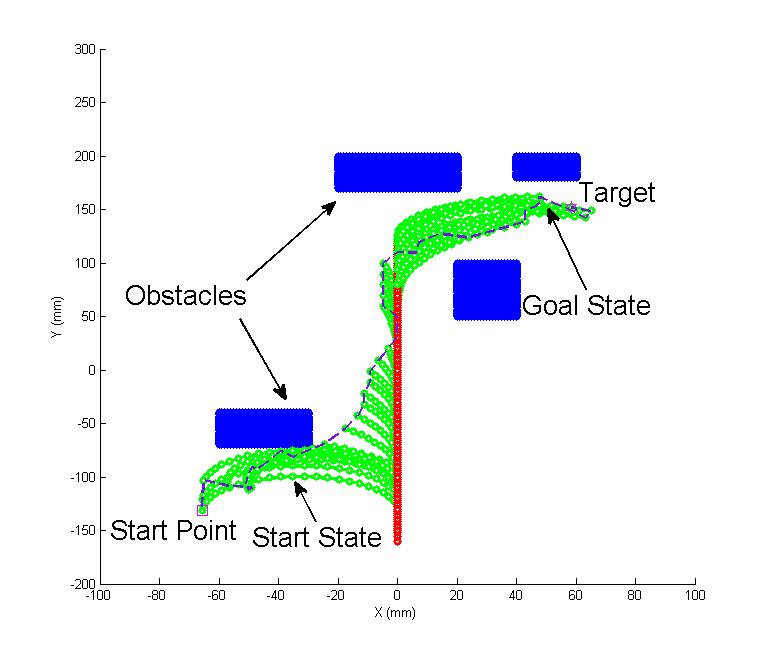
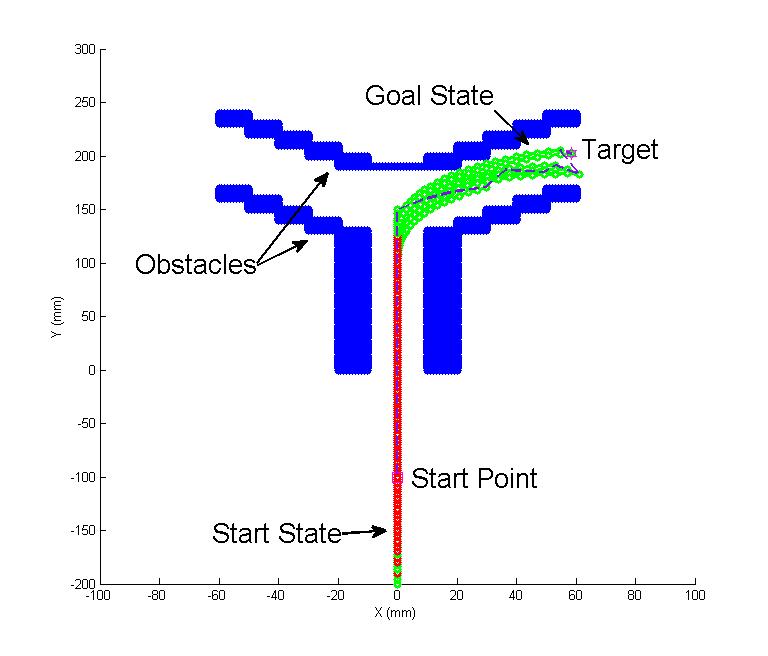
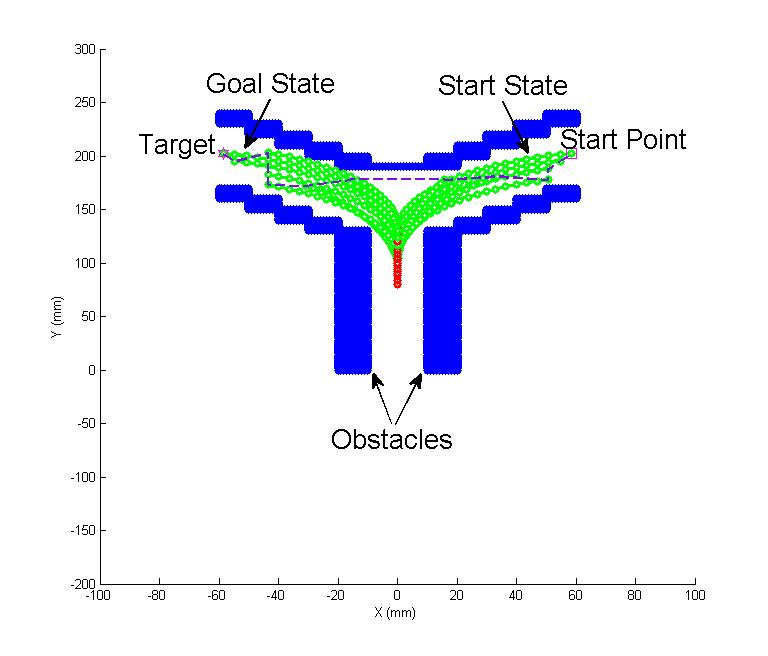
Fig.3 Simple case: a comparison simulation on a simple scenario consisting of two obstacles in the middle of the map is used for first test. The tendon-driven serpentine manipulator is left bended at the beginning and expected to reach the upper right target point. The manipulator is presented by green color (free bending segments) and red color (constrained bending segments). The distal tip trajectory is presented by a dash line. The performance of different planning algorithms in terms of sweeping area and obstacle avoidance ability are shown. Particularly, the area of green parts can be seen as the sweeping area of manipulator approximately
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
(c) RRT*
Fig.4 Complex case: a comparison simulation on a complex scenario consisting of four obstacles are used for test. The
tendon-driven serpentine manipulator is left bended at the beginning and expected to reach the target point surrounded by three obstacles in the upper right area. The differences in sweeping area and obstacle avoidance ability are shown obviously among different algorithms guidance.
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
(c) RRT*
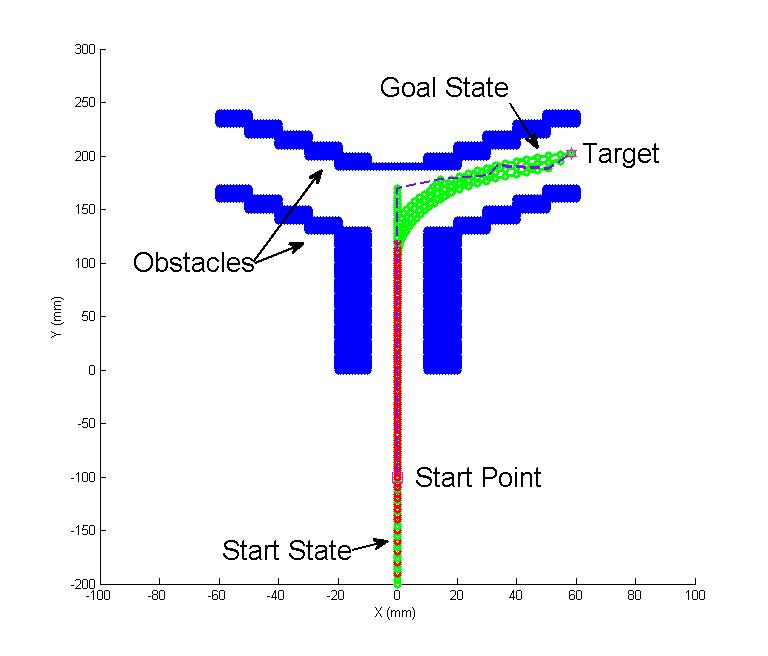
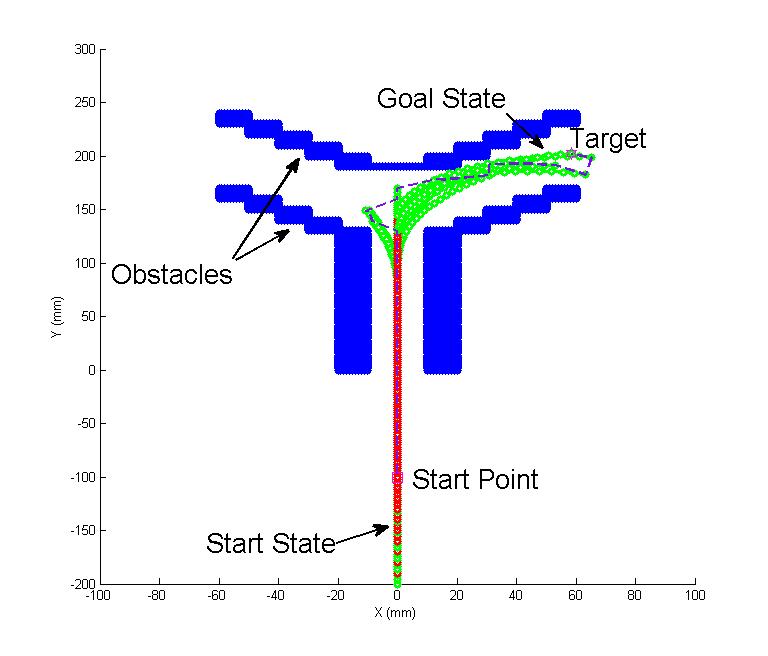
Fig.5 Tubular case 1: A virtual tubular clinical map in simulation is conducted in advance, where target is at the right side sub-branch. The tendon-driven serpentine manipulator is straight on the bottom of the tubular at the beginning.
(a) Minimum sweeping area planning algorithm
(b) Neural dynamic algorithm
(c) RRT*
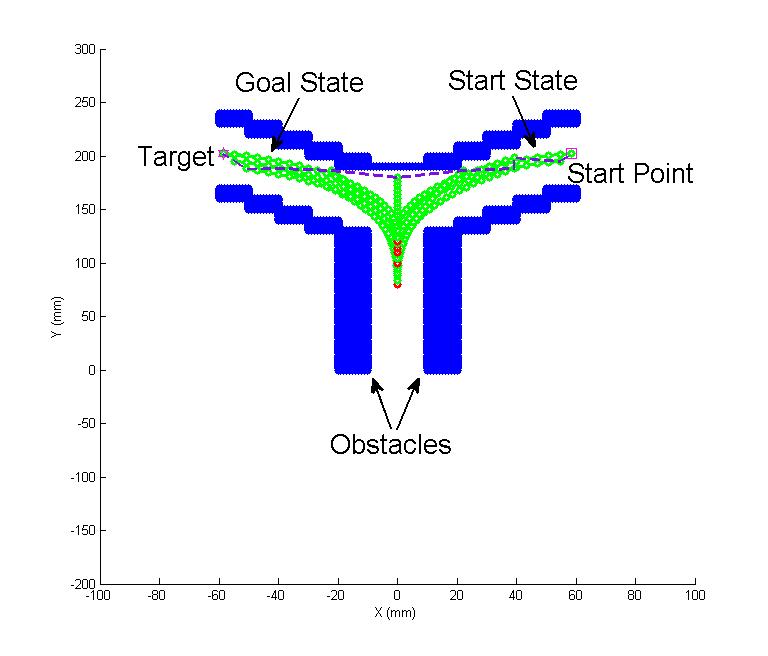
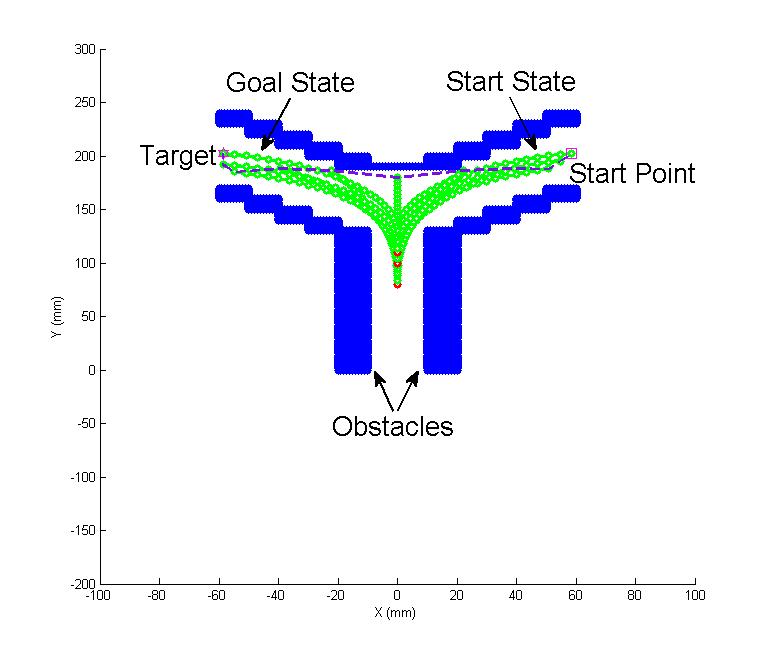
Fig.6 Tubular case 2: The same virtual tubular clinical map as Tubular case 1, but target is at the left side sub-branch and start point at the right side sub-branch. The tendon-driven serpentine manipulator is expected to move from right sub-branch to left one as manipulator moving in clinical operation.
Moreover, experiments are conducted in environments built by Lego blocks, where obstacle configurations are similar to simulation cases. In this experiment stage, the tendon-driven serpentine manipulator is expected to execute same motion sequences that are generated from complex case, tubular case 1 and tubular case 2 in simulation studies. The experimental results in phantom test are shown in video 2 (Phantom test on Lego bricks).
Finally, a preliminary transoral trials on cadaver human head is conducted to at Khoo Teck Puat Advanced Surgery Training Centre (ASTC), National University of Hospital, Singapore. The panorama of cadaver transoral experiments can be found in video 3. The operations on compute and corresponding softwares are shown in video 4. The experimental data are ploted by MATLAB, and four algorithms comparisons are shown in video 5.
[1] Yanjie Chen, Zheng Li, Wenjun Xu, Hang Zhong, Yaonan Wang and Hongliang Ren, “Minimum Sweeping Area Motion Planning for Flexible Serpentine Surgical Manipulator with Kinematic Constraints”, IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2015), Accepted.
[2] Yanjie Chen, Wenjun Xu, Zheng Li, Shuang Song, Chwee Ming Lim, Yaonan Wang, and Hongliang Ren, “Safety-Enhanced Motion Planning with Minimum Sweeping Area for Flexible Surgical Manipulators using Neural Dynamics”, IEEE Transactions on Cybernetics, Submitted.
Videos
-Support powerpoint.
-Phantom test on Lego bricks.
-The panorama of cadaveric transoral experiments.
-The compute vision and corresponding software during clinical experiments.
Spectroscopy is a fast and efficient component analysis method, and full spectrum prediction model may be redundant and inaccurate. This paper proposes a variable selection method based on information tree for spectroscopy quantitative analysis. Firstly, a feature training set that indicates the information of the selected variables is generated. Then, the partial least squares (PLS) is performed on the spectral calibration set, and root-mean-square error of cross-validation is used to evaluate the feature training set. According to the corresponding evaluation results, the information gain of each wavelength is calculated. The wavelength with maximum information gain is defined as the root node, and an information tree is built based on the information gain where each leaf node represents a wavelength. The final selection result is a conjunction path of the leaf nodes that has bigger information gain. The full spectrum PLS, the uninformative variable elimination with PLS method, the genetic algorithm with PLS method and the proposed method are conducted on the real spectral dataset of flue gas, and the effectiveness of the methods are compared and discussed. The experimental results verify that the prediction precision and the compression ability of the proposed method is higher.
The objectives of this project are to design and evaluate the performance of an electromagnetic actuated (EMA) drug delivery system and explore the related issues.
Approaches
The EMA system consists of magneto-responsive microcapsules as drug carriers, a coil system with controlled currents flowing through, as well as a tracking algorithm for close loop feedback control.
The magneto-responsive and thermal sensitive microcapsules are prepared through an encapsulator. The properties can be further utilized for controlled drug release. The encapsulated microbubbles are prepared based on a gas foaming technique for enhancing the ultrasound imaging contrast.
The coil system consists of 2 Helmoholz coil pairs and 2 Maxwell coil pairs are fabricated with printed aluminum skeleton and copper wires. A current control system including 3 DC motor governors and a USB to RS485 converter are added to realize programmable current control. Hence, the magnetic fields generated by the coils are controlled by the signals sent by the computer. Figure 1 shows the principle of actuation over the microcapsules.
Fig. 1: Principle of Magnetic Actuation over the Microcapsules
Results
Figure 2 shows the preliminary set up for actuation over microparticles within the region of interest.
Fig. 2 Setup for Microparticles Actuation
Microcapsules with evenly distributed magnetic stripes have been fabricated. The stripes make the spherical microcapsules asymmetric so that their locomotion control is directed. Alignment and movement of the microcapsules are observed in the EMA system under DC output, while rotation is observed under sinusoidal output current.
Fig. 3 Microcapsules with magnetic CI strips. Scale bar: 200μm.
Fig.4 Magnetic actuation with (A)small cylindrical magnet and (B)magnetic microcapsules
People Involved
Staff: Shen Shen, Song Shuang and Zhu Jingling
PIs: Ren Hongliang and Li Jun
Experiment Videos
Presentations and Publications
1.Shen Shen, Shuang Song, Jingling Zhu, Max Q-H Meng, Jun Li and Hongliang Ren, Preliminary Design towards a Magnetic Actuated Drug Delivery System, 7th IEEE International Conference on Cybernetics and Intelligent Systems and the 7th IEEE International Conference on Robotics, Automation and Mechatronics, 2015.
Magnetic microbubbles which can be controlled by an external magnetic field have been explored as a method for precise and efficient drug delivery. In this paper, a technique for the fabrication of microbubble encapsulated magnetic spheres is presented. The resultant magnetic spheres were subsequently imaged using ultrasound and the encapsulated microbubbles proved to appear as bright spots and resulted in enhanced ultrasound image contrast, as compared to the solid magnetic spheres which appeared dull. A tracking algorithm was then developed for the tracking of the magnetic microbubbles based on optical flow tracking. Further development of the magnetic microbubbles and tracking algorithm can lead to future use of the tracking algorithm in the case of in vivo injection of the magnetic microbubbles.
Publications
1. Loh Kai Ting, Ren Hongliang and Li Jun, Tracking Magnetic Particles under Ultrasound Imaging using Contrast-Enhancing Microbubbles, The 11th Asian Conference on Computer Aided Surgery, 2015.