This work presents a novel soft actuator with a 3D-printed elastic body based on a fused-deposition-modeling technique and with tendon actuation based on flexible shafts, which allow push, pull, and twist torque transmissions. The combination of the soft body and flexible shaft furnishes an easy-making, modular and functional unit that possesses softness and enables three degrees of freedom. We derive the kinematics and statics of the actuator based on the assumption of piecewise constant curvature, and identify the parameters experimentally. To understand the performance of the soft actuator in different design and fabrication settings, extensive experiments are performed to compare different shapes of cross sections, infill densities, infill patterns, dentation structures and moment arms in terms of generating forces under the same pulling forces. In addition, experimental validations are performed to characterize other properties such as workspace, hysteresis, pushing force, transmitted torque, and tip force under both bending and twisting. Finally, three potential applications, i.e., a soft robotic hand, a multisegment continuum robot, and a miniaturized drilling device, are prototyped and presented experimentally where the flexibility endowed by the shafts is demonstrated and highlighted. The scalability and modularity are also showcased in the three applications.
Biology has always motivated engineers to come up with efficient and reliable machines to move in complex environments. The dexterity, softness, and body compliance of natural system such as cephalopods or caterpillars have inspired robotic engineers to incorporate soft, deformable materials such as gels and elastomers into their designs. Hence, the inception of soft robots shifts the paradigm and trends in robotics, which could potentially revolutionize health care, human–robot interaction, field exploration, rehabilitation, and related applications. Throughout this review article, we have restricted our discussion to the applications of soft robots in biomedical domains exclusively and the perennial challenges faced therein.
Soft-bodied robots, due to their intrinsic compliance, have shown great potential for operating within unstructured environment and interacting with unknown objects. This paper deals with automatic design and fabrication of soft robots. From a structure point of view, we synthesize a soft cable-driven gripper by recasting its mechanical design as a topology optimization problem. Building on previous work on compliant mechanism optimization, we model the interactions between the gripper and objects more practically, in form of pressure loadings and friction tractions, and further, we investigate how the interaction uncertainties affect the optimization solution by varying the contact location and area. The optimized soft fingers were 3D printed and then assembled to build a gripper. The experiments show that the gripper can handle a large range of unknown objects of different shapes and weights (up to 1 kilogram), with different grasping modes. This work represents an important step toward leveraging the full potential of the freeform design space to generate novel soft-bodied robots.
Electromagnetic needleless injector with halbach array towards intravitreal delivery
IEEE Access 2017
Abstract
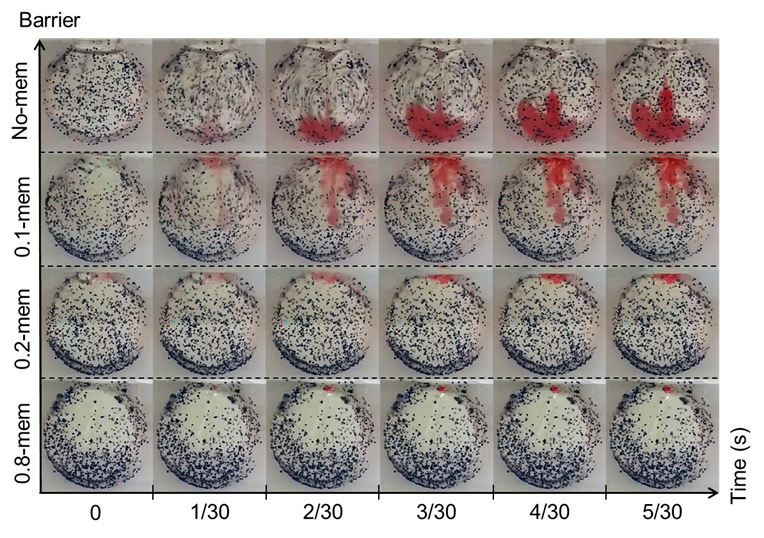
The fear of pain and needles deter some patients from seeking intravitreal treatment, which drives our group to develop an needleless device for performing intravitreal injections. A prototype for an electro-magnetically actuated needleless injector, based on Halbach arrays, is described and characterized in a lab setting. The implication of the prototype for needleless ocular drug delivery is investigated. This investigation is intended to eventually improve drug delivery of glaucoma medication enabling safe needleless approaches. We detail the design aspects of the injector and characterized the device with custom-made phantoms. It was observed that, despite delivering the drug bolus to the center, the viscous vitreous phantom indicated vorticities similar to counter rotating vortex pairs, which could damage the retina. The observed peak velocity during the phantom experiments was 6.1mm/sec at the retinal layer, indicating that the delivery bolus can impart shear forces to the retina via the vitreous.
Design and Characterization of an Electromagnetic Needleless Injector Based on Halbach Design Towards Intravitreal Delivery
Supporting videos
> 1-minute short video demo
> full video demo
Appendix
The results comparing the measured Fz, the force in the normal direction to the sensor surface, and Mag, the magnitude of the force vector, across the various depths of injection and at the two voltage points.
Fig 24. Left (15V) Right (20V); Top (Fz) Bottom (Mag)
Comparison between the four depths did not show significant differences:
Changing the distances between the sensor surface and the injection nozzle does not appear to have a distinguishable relationship. Note: each data plot is the average from 3 data samples. This is indicative of the following; regardless of the size of the orbital, the peak force observed is going to be dependent on the injectant properties. We note that more experiments should be done for characterization of distances between 20mm and 12.5mm, we did not test this range due to concerns over damaging the sensitive ATInano17, and hence the initial expectation of measuring 20 to 35mm and anticipating an extrapolate-able relationship. The rational for these distances assumes an orbital diameter of 25mm and the drug is delivered to the center at 12.5mm. The 25mm distance is likely to be near the retinal layer and 20mm would be in between.
Test in phantom chamber:
The dimension of the vitreous phantom chamber is a cylinder with height 17mm and diameter of 25mm. This relates to a volume of approximately 8345uL. This is significantly larger than the vitreous volume in human eyes. Assuming the human vitreous to be 4000uL, the height of our cylinder should be 8mm. In such a scenario, the rotational symmetry in the spherical orbital is lost and hence the flow will be more a keen to a 2D planar flow rather than a 3D flow. Our selection of 17 mm was a compromise between maintaining the 3D flow while allowing an observable 2D slice of the injection profile. In addition, the selection of the 10.9 mm by 17 mm access point is arbitrary. Its purpose was to allow ease of filling and removal of vitreous phantom while maintaining the spherical shape as much as possible. The current dimensions relates to a chord at 11.25mm from the center of the circle, thus maintaining at least 95% of the diameter.
Related Publication
Electromagnetic needleless injector with halbach array towards intravitreal delivery (in press) IEEE Access, 2017
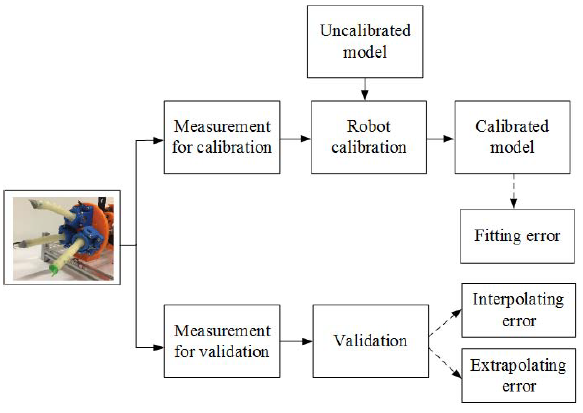
Simultaneous Robot-World, Sensor-Tip, and Kinematics Calibration of an Underactuated Robotic Hand with Soft Fingers
Ning Tan, Xiaoyi Gu, and Hongliang Ren Senior Member, IEEE
Abstract—Soft robotics is a research field growing rapidly with primary focuses on the prototype design, development of soft robots and their applications. Due to their highly deformable features, it is difficult to model and control such robots in a very precise compared with conventional rigid structured robots. Hence, the calibration and parameter identification problems of an underactuated robotic hand with soft fingers are important, but have not been investigated intensively. In this paper, we present a comparative study on the calibration of a soft robotic hand. The calibration problem is framed as an AX=YB problem with the partially known matrix A. The identifiability of the parameters is analyzed, and calibration methods based on nonlinear optimization (i.e., L-M method and interior-point method) and evolutionary computation (i.e., differential evolution) are presented. Extensive simulation tests are performed to examine the parameter identification using the three methods in a comparative way. The experiments are conducted on the real soft robotic-hand setup. The fitting, interpolating, and extrapolating errors are presented as well.
Index Terms—Soft robotics, calibration and identification, robotic hand, AX=YB, hand-eye calibration, tendon-driven robot
The biomedical engineering design teams, under our lab won “The most innovative design award”, “The best presentation award”, and “The most elegant instrumentation award” among 12 BN3101 teams of this year.