Dr. Ren was invited to give a keynote talk at International Conference on Innovative Design and Manufacturing ICIDM WHUT on design and measurements in medical robotics.




Dr. Ren was invited to talk at The Asian Summit on Robotic Surgery (ASRS) 2018 for ACTORS in ENT surgery (Singapore).
Dr. Ren was invited to talk at Spain, IROS2018 Workshop: WS10: Assistive Technologies for Precision Neurosurgery: Current Successes and Future Challenges (Oct, 2018)

Dr. Ren was invited to talk at Spain, IROS2018 Workshop: Continuum and Soft Robots (CSR) (Oct, 2018)

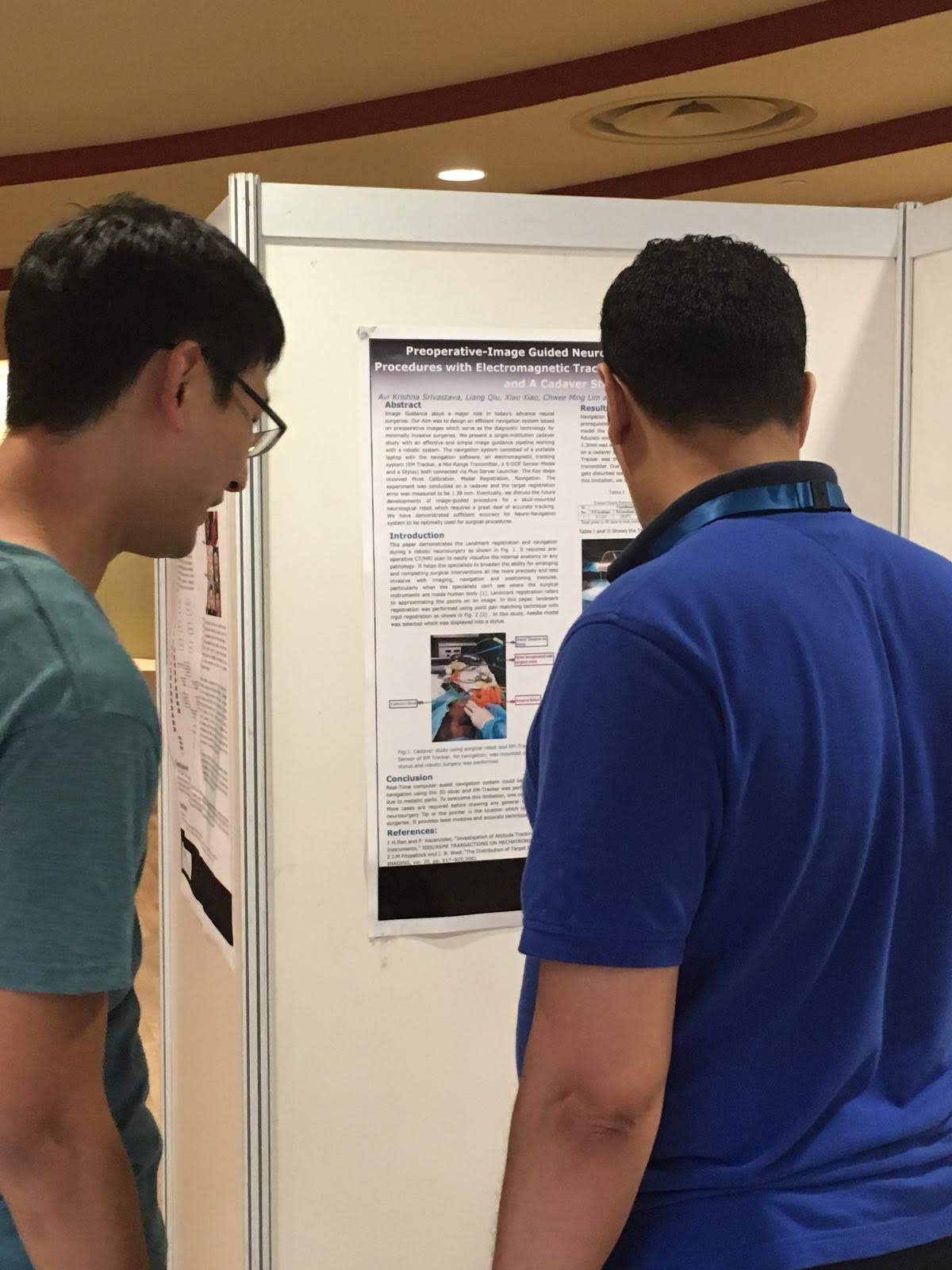
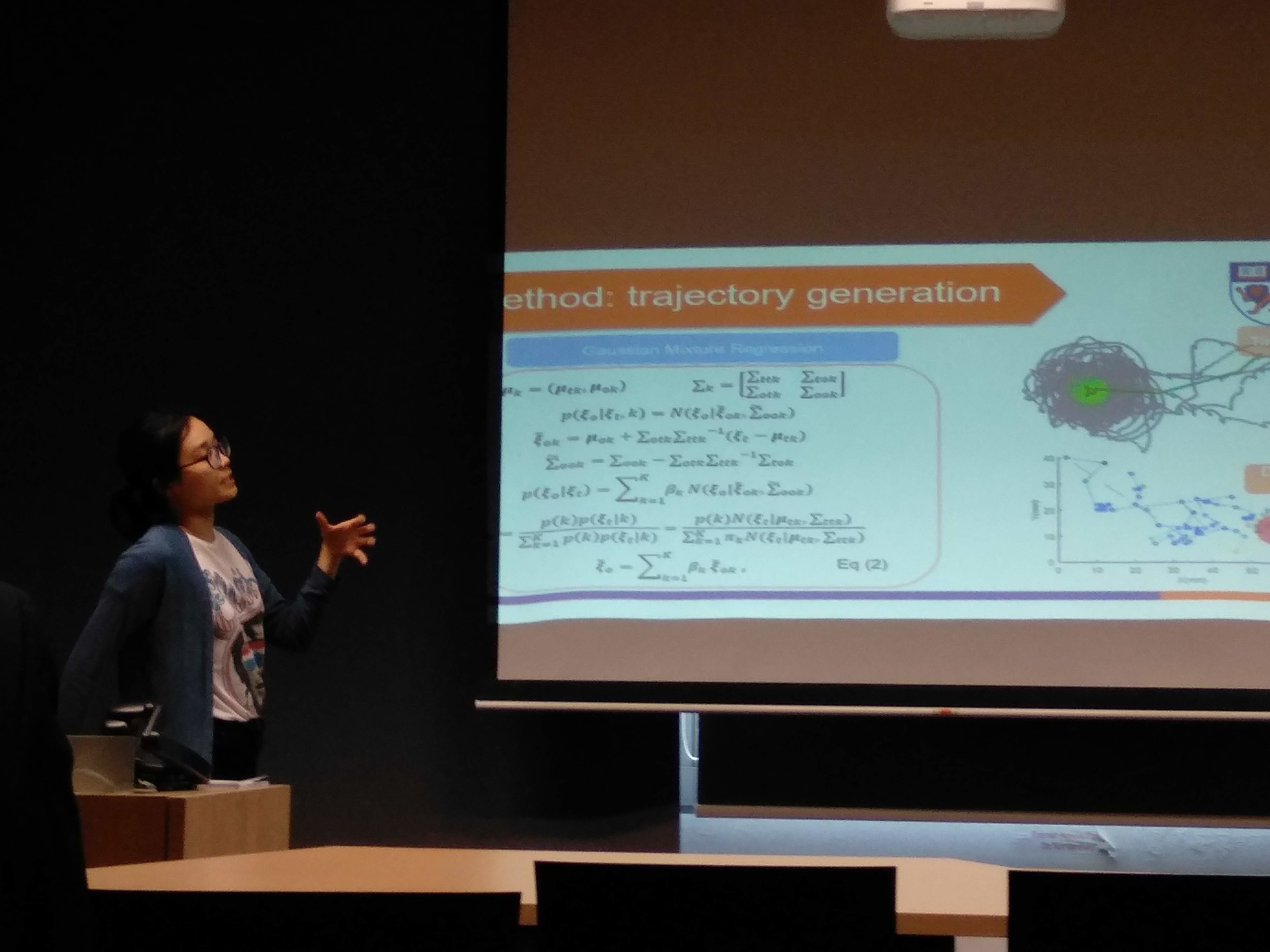
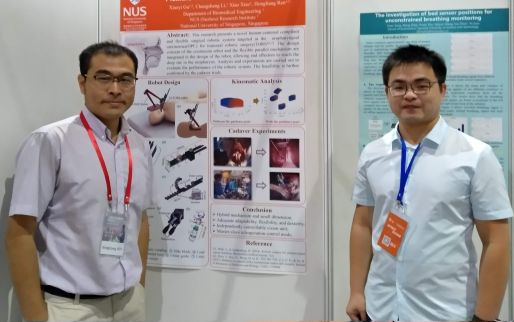
Our team members were presenting research publications and doing lab demos during IEEE ICARM 2018 (The IEEE International Conference on Advanced Robotics and Mechatronics).


| authors | title |
| Sri Sai Krishna Suraj Narapareddi, Vineeth Muppalla, Parita Sanghani and Hongliang Ren | Comparative Study of Unsupervised Segmentation Algorithms for Delineating Glioblastoma Multiforme Tumour |
| Avi Srivastava, Hongliang Ren and Liang Qiu | Preoperative-Image Guided Neurosurgical Navigation Procedures with Electromagnetic Tracking: An Effective Pipeline and A Cadaver Study |
| Abhishek Bamotra and Hongliang Ren | Characterization and Fabrication of Novel Soft Compliant Robotic End-Effectors with Negative Pressure and Mechanical Advantages |
| Hritwick Banerjee, Oh Yao Wei Aaron, Bok Seng Yeow and Hongliang Ren | Fabrication and Initial Cadaveric Trials of Bi-directional Soft Hydrogel Robotic Benders Aiming for Biocompatible Robot-Tissue Interactions |
| Shradha Singhvi and Hongliang Ren | Comparative Study of Motion Recognition with Temporal Modelling of Electromyography for Thumb and Index Finger Movements aiming for Wearable Robotic Finger Exercises |
| Wenjun Xu and Hongliang Ren | Human Palpation Behavior Modeling with Mixture Models: Towards Autonomous Robotic Palpation |
Dr. Ren gave a keynote talk at the 2nd Shanghai International Symposium on Human-Centered Robotics, HCR 2018, held together with the 12th international
Convention on Rehabilitation Engineering and Assistive Technology i-CREATe 2018. our lab abstract “Design of a Human-Centered Compliant and Flexible Transoral Robotic System“ has also been accepted for “Poster Presentation” at the conference.
Dr. Ren was invited to talk at HUST (Huazhong University of Science and Technology) on medical robotics.

Our undergraduates DCP project on surgical robotics received 2 awards: FoE 32nd Innovation & Research Award (IRA High Achievement) and NUS Outstanding Undergraduate Researcher (OUR) Prize.

Cai Jiayi, Catherine Cai Xinchen Krishna Ramachandra Seenivasan Lalithkumar Ren Hongliang (Advisor), Project: Image-guided minimally invasive robotic surgery, Faculty of Engineering Innovation & Research Award (High Achievement) & Outstanding Undergraduate Researcher Prize
Dr. Ren received the Interstellar EARLY CAREER INVESTIGATOR AWARD given by the New York Academy of Sciences and the Japan Agency for Medical Research and Development (AMED) and attended the Interstellar workshop held at the New York Academy of Sciences conference center in New York City.
Our team’s showcasing at innovfest unbound 2018 (attended by ~14,000 key players in the technology and innovation scene, Southeast Asia’s largest innovation festival) for two technologies in flexible robotics: ONR grasper and ACTORS.

cof