The biomedical engineering design teams, under our lab won “The most innovative design award”, “The best presentation award”, and “The most elegant instrumentation award” among 12 BN3101 teams of this year.




The biomedical engineering design teams, under our lab won “The most innovative design award”, “The best presentation award”, and “The most elegant instrumentation award” among 12 BN3101 teams of this year.



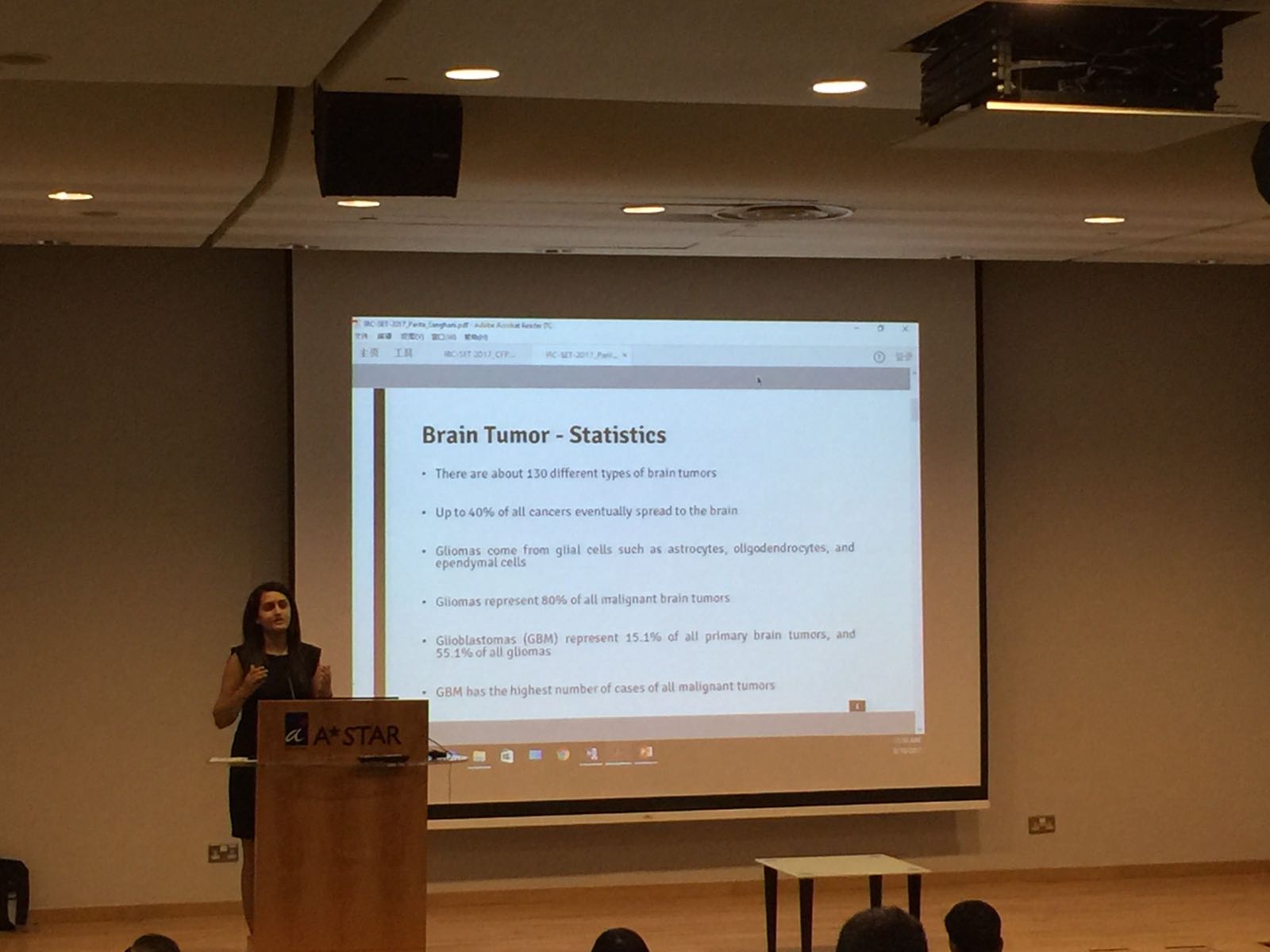
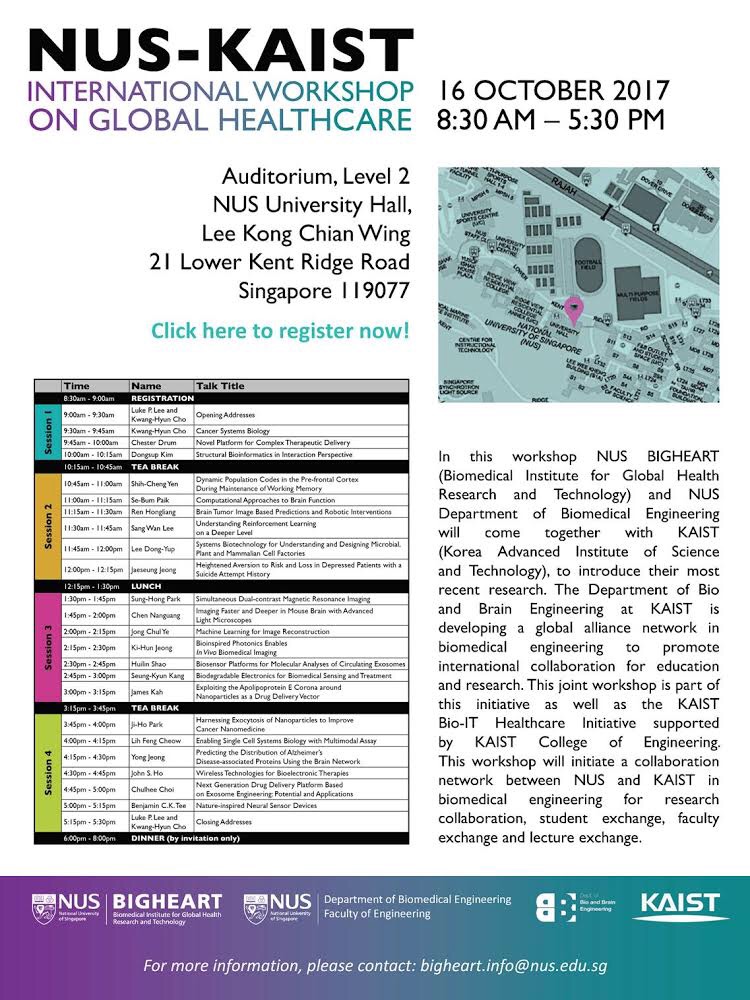
Dr. Ren invited to talk at KAIST-NUS workshop on global healthcare

Our Team ACTORS won the gold award at EMedic Global 2017 out of about 20 teams
Our papers on surgical navigation and flexible robotics were presented in the conference and also Dr. Ren chaired the session for medical robotics.
Our papers on surgical navigation and automatic medical image analysis were pretended.


| DEVELOPMENT OF FLEXIBLE FABRIC BASED TACTILE SENSOR FOR CLOSED LOOP CONTROL OF SOFT ROBOTIC ACTUATOR |
| Godwin Ponraj, Senthil Kumar Kirthika, Nitish V. Thakor, Fellow, IEEE, Chen-Hua Yeow, Member, IEEE, Sunil L. Kukreja, Senior Member, IEEE and Hongliang Ren†, Member, IEEE |
Abstract— The ability to sense and measure object properties based on touch is known as tactile sensing. The flexibility and dexterity of soft robots can be fully explored, only with efficient tactile feedback from the environment or the objects the robot interact with. This paper discusses about the development of a soft fabric based piezoresistive tactile sensor, the related calibration experiments and procedures. Fabric based sensors are flexible, stretchable and can confer to both hard and soft surfaces easily. The ability of the tactile sensor to enhance the efficiency of robotic activities is demonstrated in a simple cutting task. The robotic end effector used is a pneumatically controlled soft gripper. Experimental results show that the feedback from the tactile sensor developed is successfully used to detect the completion of the cutting task.
Index Terms – Fabric force sensor, Piezoresistive sensor, Soft robotic finger, Tactile feedback, Closed loop control.
Our team attended IRC-SET 2017 and presented