We are excited to share our latest Comment published in #npj Digital Medicine:
“How can reasoning capability empower the AI copilot robot in endoscopic surgery”
Current AI copilots in endoscopic surgery are still largely reactive and vision-driven. While they can detect anatomy, instruments, and scene changes, they often still struggle to truly understand surgical intent, infer hidden tissue dynamics, and respond robustly to uncertainty—all of which are essential for safe and precise intraoperative assistance.
In this article, we highlight how reasoning capability can become a key enabler for the next generation of AI copilot robots in endoscopic surgery:
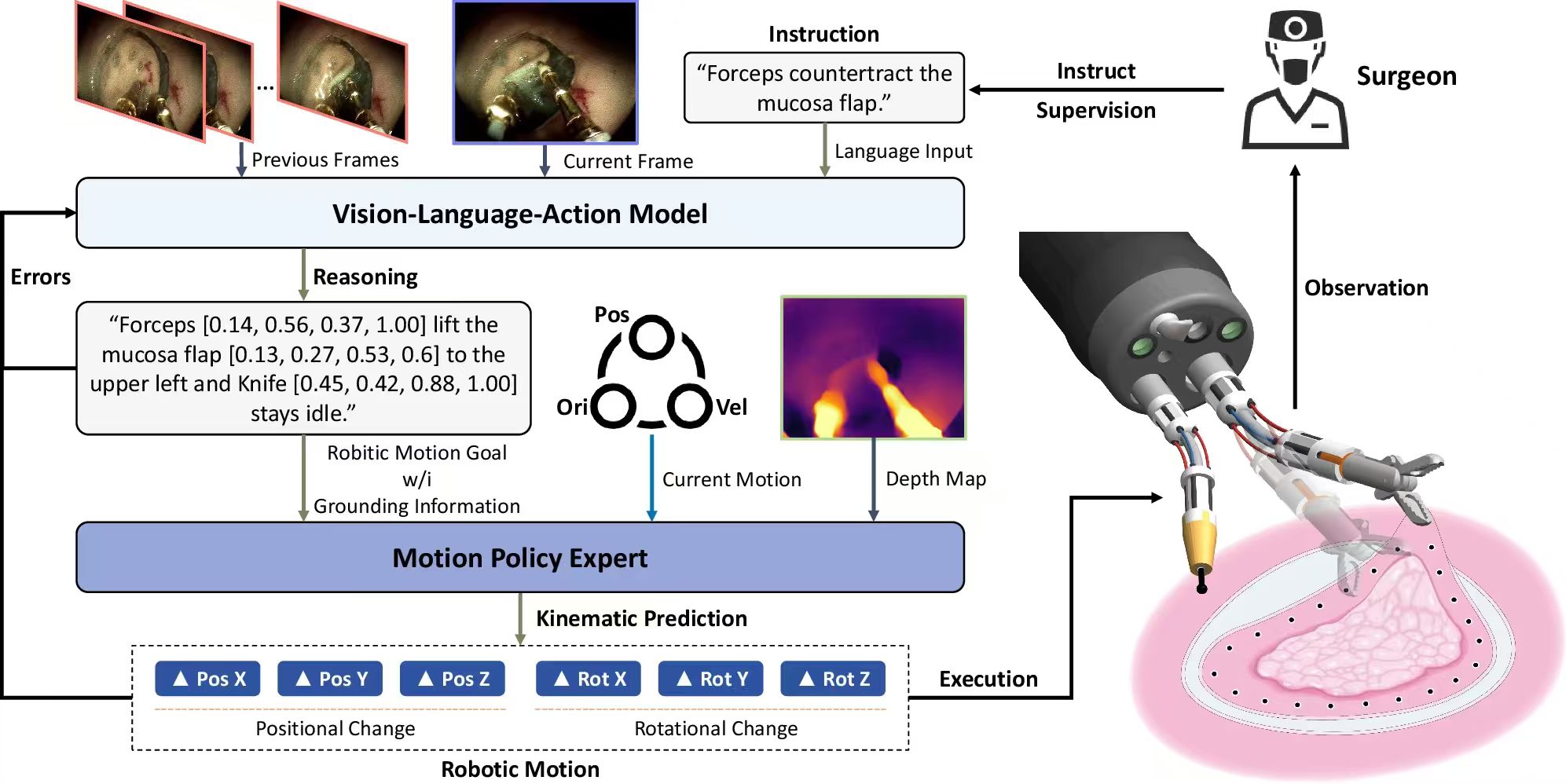
- 🧠 Reasoning beyond perception: Enabling VLA-based surgical robots to go beyond simple visual recognition and translate high-level surgeon intent into precise, context-aware low-level motion goals.
- 🔄 Multimodal and uncertainty-aware intelligence: Fusing endoscopic vision with preoperative imaging, intraoperative sensing, and tracking signals, while dynamically re-weighting information sources under occlusion, bleeding, smoke, and other uncertain conditions.
- 🤝 Coordinated multi-instrument collaboration: Supporting synchronized control of multiple tools for subtasks such as traction, dissection, and hemostasis, with reasoning-guided adaptation to tissue deformation and workflow variation.
- 🔮 Anticipatory and safer decision-making: Using chain-of-thought-style reasoning to forecast tissue response, evaluate possible action outcomes, and generate more conservative and interpretable assistance under risk.
- 🏥 Surgeon-in-the-loop clinical deployment: Framing the AI copilot robot at LoA 2–3, where the system assists with task generation, monitoring, and bounded low-level execution under explicit safety constraints and continuous surgeon oversight.
We believe the future of endoscopic robotic assistance lies not only in systems that can see, but in systems that can reason, adapt, and collaborate. With reasoning-enabled VLA models, AI copilot robots may evolve from reactive executors into true cognitive partners in the operating room.
📃 Read the full paper here: https://www.nature.com/articles/s41746-026-02827-8
👏 Kudos to the team: Mr. Guankun Wang, Dr. Long Bai, and Prof. Hongliang Ren.